Spionera på din katt med den här robotkameran. Bygg ihop robotkameran och kontrollera den med en liten joystick. Se kamerabilden live på på datorskärmen och när din katt gör någonting misstänksamt, ta en bild!
Material
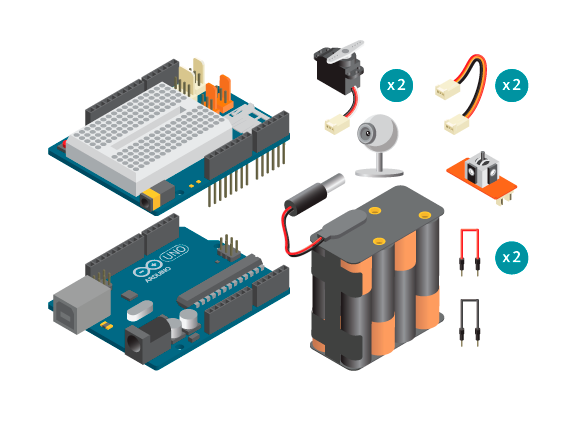

- 1 Arduino Uno
- 1 Education-sköld
- 1 webbkamera
- 1 TinkerKit-joystick
- 2 standardservon
- 2 TinkerKit-kablar
- 3 labbkablar
- 8 AA-batterier
- 1 AA-batterihållare
- 1 strömkontakt
- Robotkamera-kit
Instruktioner
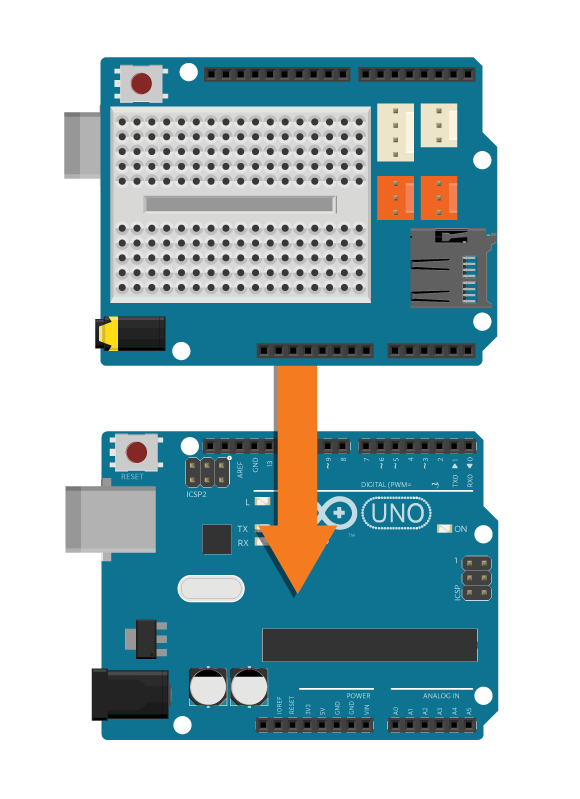
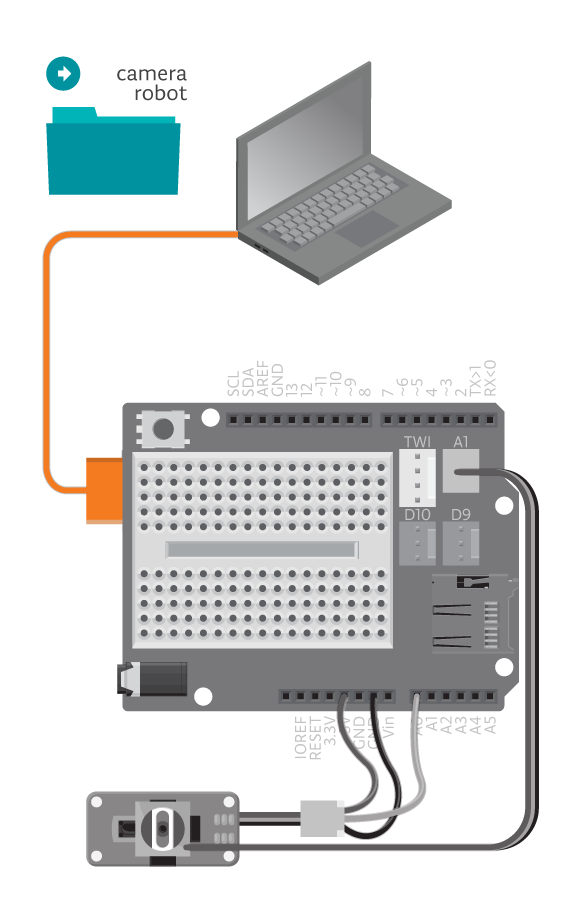
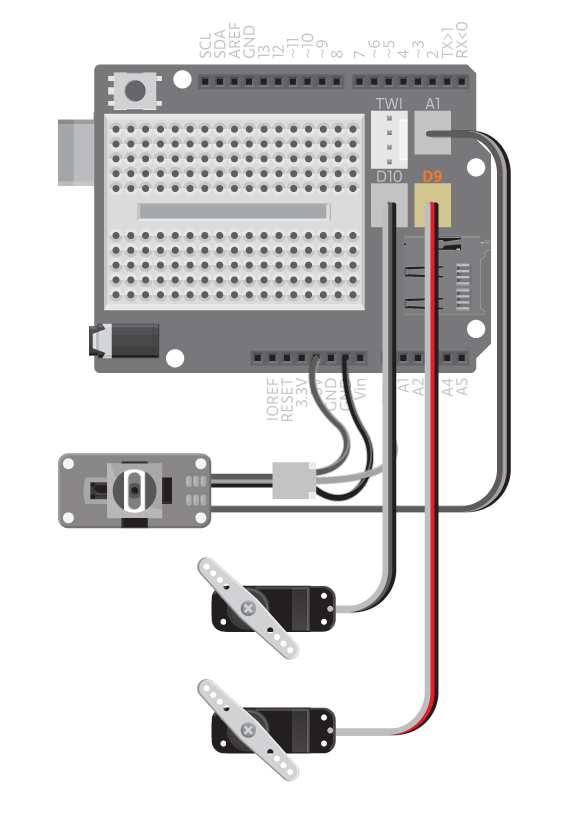
- Fäst skölden på Arduinons ovansida.
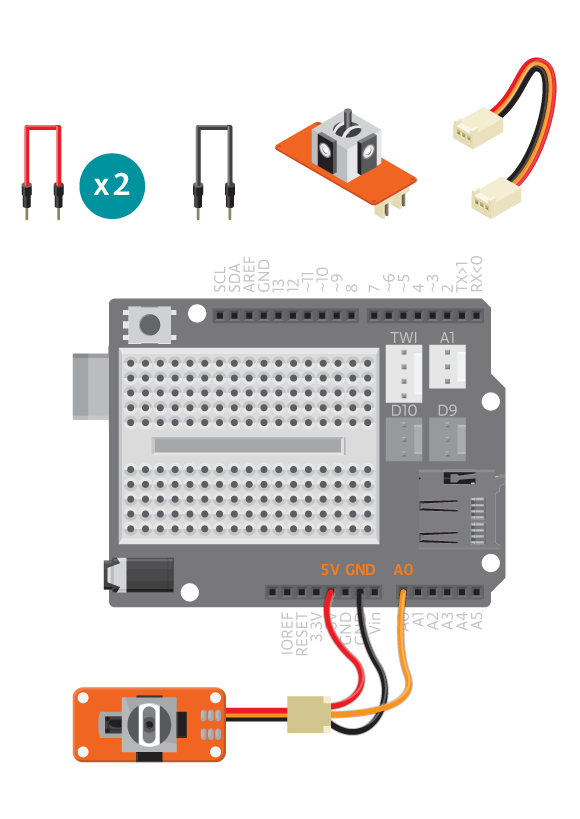
- Koppla en TinkerKit-kabel till joystickens Y-kontakt. Koppla en röd labbkabel till den röda kabeln på TinkerKit-kabeln, och till 5V. Koppla en svart labbkabel till den svarta kabeln på TinkerKit-kabeln, och till GND. Koppla den sista labbkabeln till TinkerKit-kabeln och analoga pin A0.
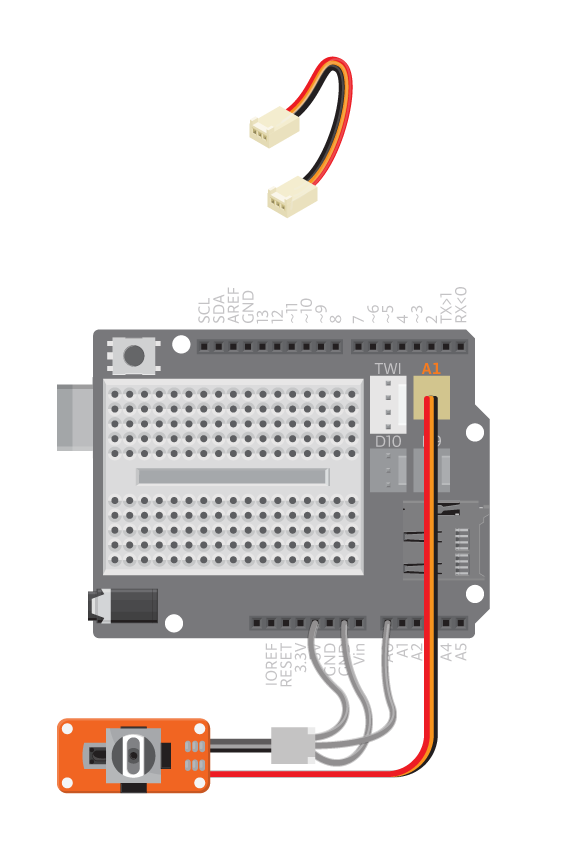
- Koppla den andra TinkerKit-kabeln till joystickens X-kontakt, och till den analoga TinkerKit-kontakten, A1.
- Koppla konstruktionen till datorn och ladda upp exemplet ’CameraRobot’.
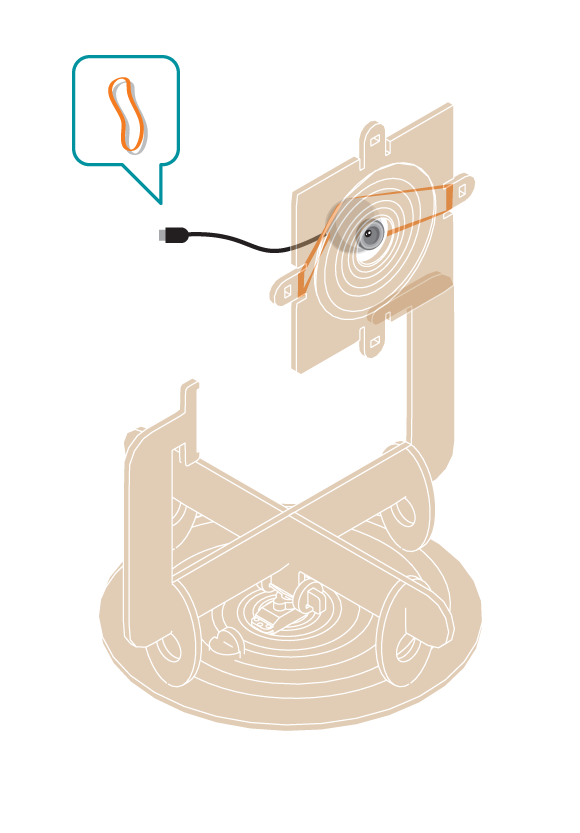
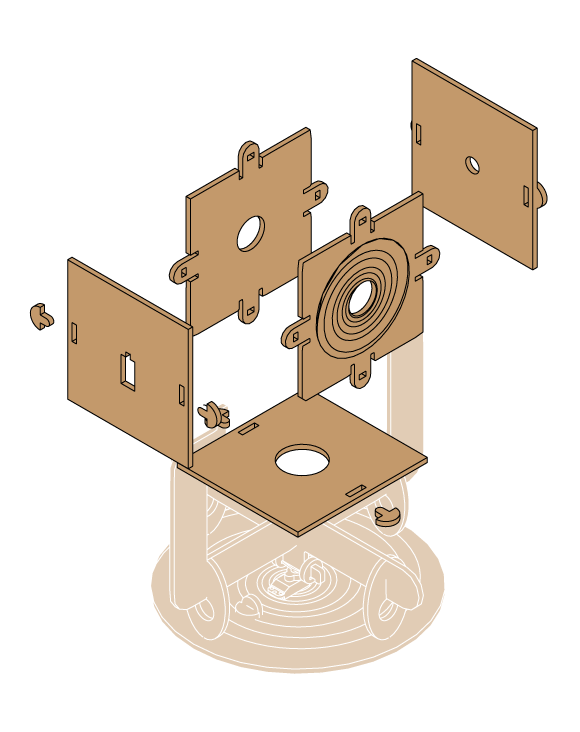
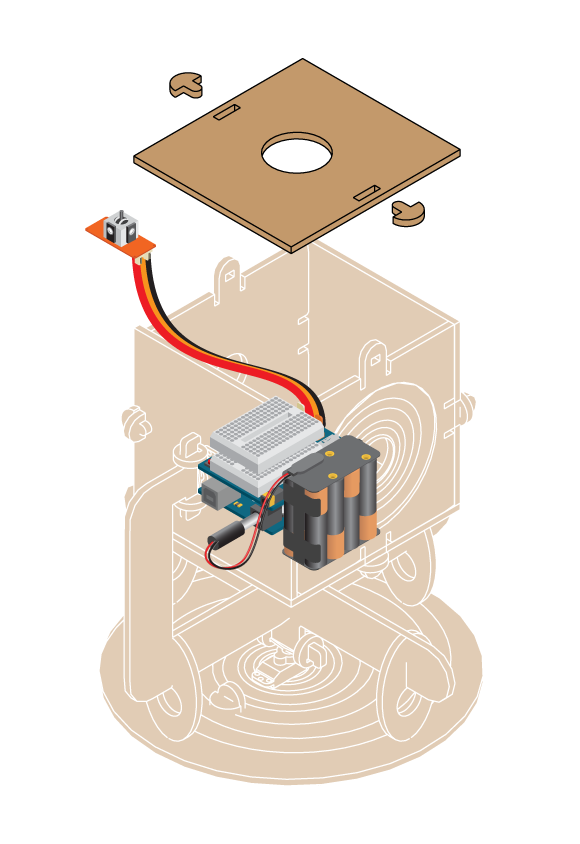
- Bygg kitet, glöm inte att placera webbkameran inuti!

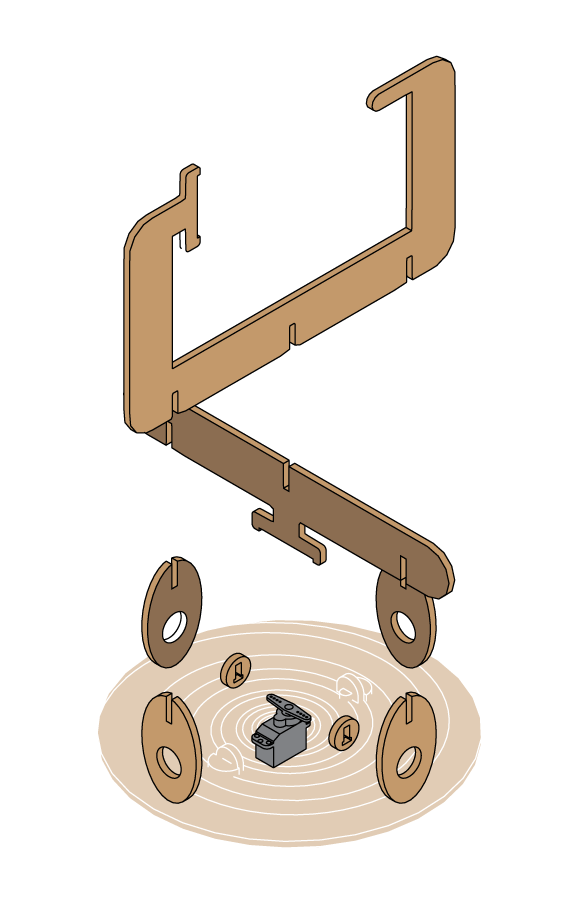
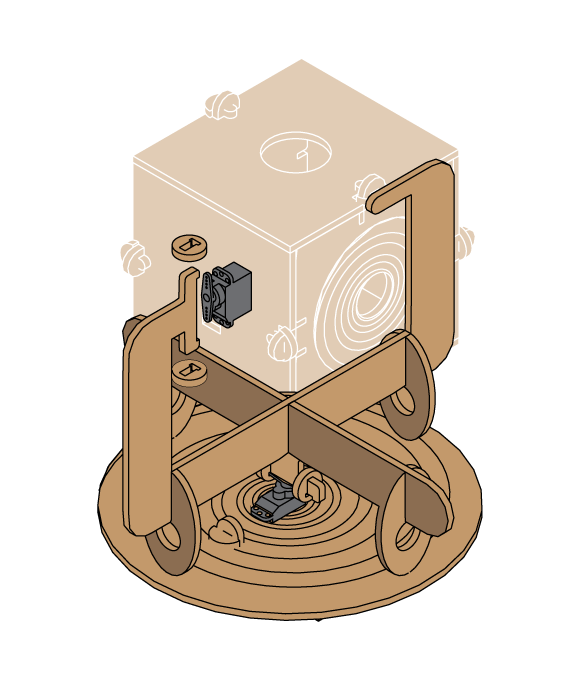
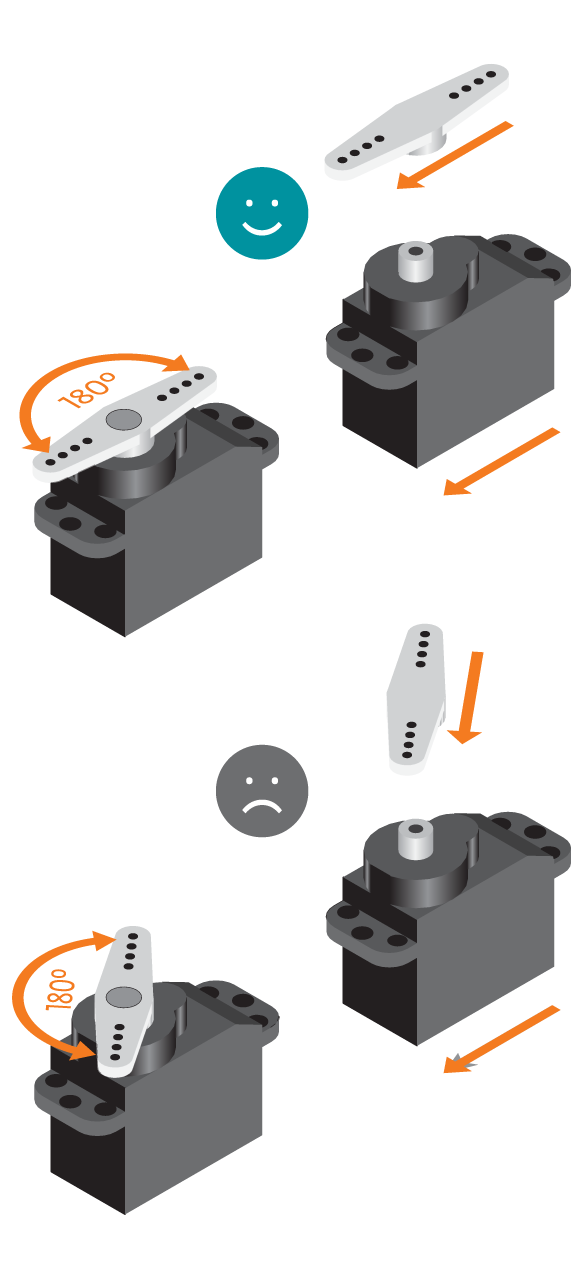
- Vrid på servo-armen för hand åt ett håll, så långt det går. Vrid den sedan därifrån till 90 grader. Ta loss armen och sätt tillbaka den så att den går längs med servon. Gör samma sak med den andra servon.
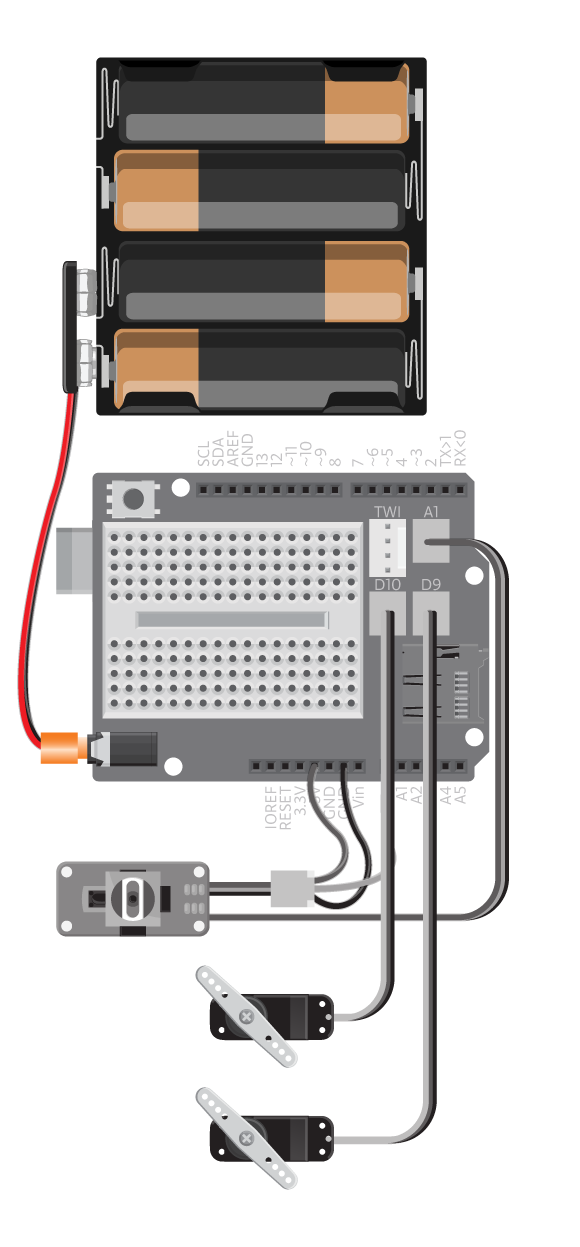
- Koppla “lutnings-servon” till D10.
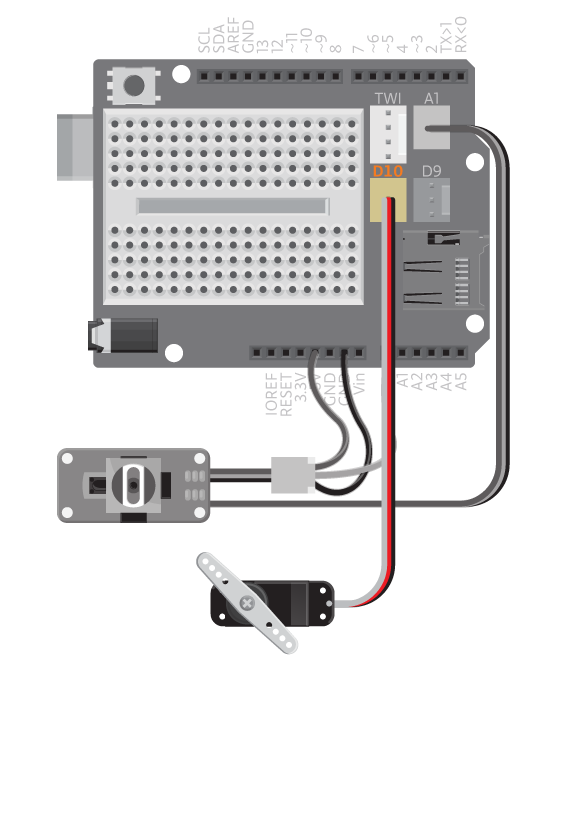
- Koppla “panorerings-servon” till D9.
- Koppla batteripaketet till Arduinons strömkontakt.
- Koppla webbkameran till din datorn. Öppna Processing-programmet CameraRobot.

Kod
Hitta koden File>Examples>EducationShield>Block4-Robots>Projects>CameraRobot
Hitta Processing-koden i File>Examples>EducationShield>Block4-Robots>Projects>CameraRobot>Processing>CameraRobot
Så här fungerar det
- EducationShield- och Servo-biblioteken inkluderas.
- Joystick- och Servo-objekten deklareras.
- Variablerna som används för att sätta servons positioner deklareras,
panAngleochtiltAngle. - Variablerna som används för att lagra joystickens värden deklareras,
panJoystickochtiltJoystick. - I
setup()initialiseras servo-objekten. - I
loop()läses joystickens x-värde av och lagras ipanJoystick. - Joystickens y-värde läses av och lagras i
tiltJoystick. - Om
panJoystickinte är lika med 0, betyder det att joysticken har flyttats i x-axeln, och följande händer:- Om
panJoystickär lika med 1 ochpanAngleär mindre än 180, ökaspanAnglemed 1. - Om
panJoystickistället är lika med -1 ochpanAngleär större än 0, minskaspanAnglemed 1.
- Om
- Nästa if-sats i
loop()kontrollerar omtiltJoystickinte är lika med 0. Om det är sant händer följande:- Om
tiltJoystickär lika med 1 ochtiltAngleär mindre än 180 ökastiltAnglemed 1. - Om
tiltJoystickistället är lika med -1 ochtiltAngleär större än 0, minskastiltAnglemed 1.
- Om
- “Panorerings-servons” position bestäms med
panAngle. - “Lutnings-servons” position bestäms med
tiltAngle. - Programmet pausas i 5 millisekunder för att ge servon lite tid att komma på plats.
loop()fortsätter att upprepas.
Problemlösning
- Hänvisa till illustrationen och dubbelkolla dina kopplingar. Var noga med att skölden och labbkablarna är ordentligt kopplade.
- Var noga med att ha kopplat servorna korrekt. Se referenssidan för standardservo.
- Var noga med att ha kopplat joysticken korrekt. Se referenssidan för joystick.
Lär genom att göra
- Servorna kanske rör sig för snabbt eller för långsamt. Ändra på
delay()-tiden i slutet avloop(), eller ändra på stegens storlek. - Servorna kanske rör sig för långt åt sidorna, eller för högt eller lågt. Begränsa de tillåtna vinklarna.
- Bygg någonting annat som använder en “lutnings-servo” och en “panorerings-servo” och som du kontrollerar med en joystick.