Cuando utilices dos servos a la vez, tu placa Arduino puede tener un problema con darles la suficiente corriente. Hay diferentes técnicas para controlar esto. Aquí vas a explorar la técnica de escribir señales a los servos por separado. Este control lo harás desde tu programa.
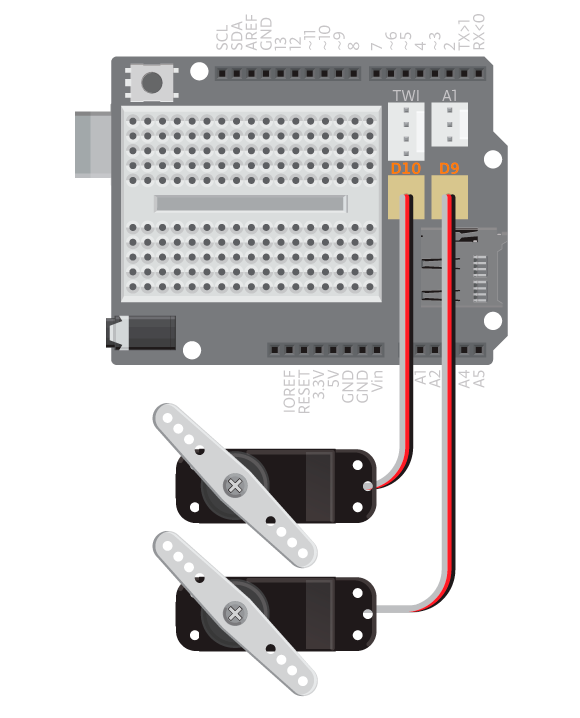
Conecta dos servos a la shield, uno a D9 y otro a D10.
Escribe el siguiente código en el IDE de Arduino:
#include <Servo.h>
Servo myservo1, myservo2;
void setup() {
myservo1.attach(9);
myservo2.attach(10);
}
void loop() {
myservo2.detach();
myservo1.attach(9);
myservo1.write(70);
delay(1000);
myservo1.write(120);
delay(1000);
myservo1.detach();
myservo2.attach(10);
myservo2.write(70);
delay(1000);
myservo2.write(120);
delay(1000);
}
Del mismo modo, para hacer el mismo movimiento con myservo2 necesitas desconectar mysevo1 y conectar myservo2.
¡Sigue experimentando!
- Inventa un robot que use un motor de giro continuo y otro de giro estándar para que se mueva hacia adelante, ¿cómo lo harías?