Este es un robot normal con cosquillas en una mecedora. Si lo piensas bien, no suena nada normal. Hazle cosquillas en su corazón y empezará a menearse como loco.
Archivos de la categoría Bloque 4
Robots
Esta semana vamos a construir robots. Os juntaréis en grupos y construiréis diferentes máquinas a partir de motores. La función básica de estos motores es muy sencilla pero verás que, dependiendo de cómo los utilices, podrás animar los elementos de maneras muy diferentes. Cada grupo hará su propio robot y al final de la semana, lo enseñaréis al resto de la clase.
Antes de nada, comenzaremos con una introducción a los distintos tipos de motores que existen y veremos unos ejemplos sobre cómo utilizarlos.
Tipos de motores
Para controlar los motores, utilizarás la placa Arduino. Básicamente, cualquier objeto electrónico que hayas visto o conoces, tiene alguna pieza en movimiento. Por ejemplo: impresoras, coches de juguete, cepillos de dientes eléctricos, etc.; todos, contienen motores. Los hay de muchos tipos, pero principalmente encontrarás tres tipos de motores:
Servo estándar
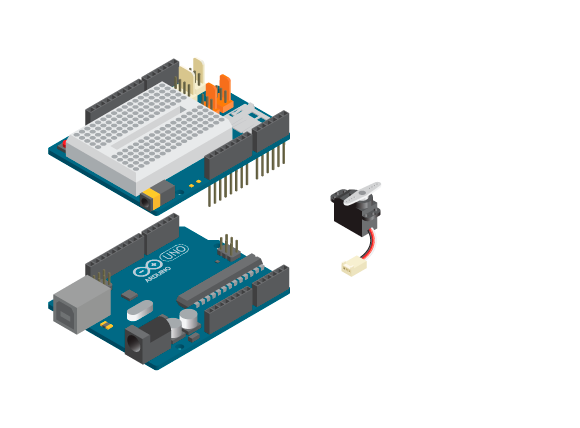
Servo de giro continuo
Ahora vamos a probar el servo motor de giro continuo. Se conecta el servo continuo exactamente de la misma manera que el estándar. Puedes controlar el servo continuo escribiendo una velocidad en lugar de una posición. Mira lo que sucede cuando cargas el mismo código que en el ejemplo anterior.
Utilizando dos servos
Cuando utilices dos servos a la vez, tu placa Arduino puede tener un problema con darles la suficiente corriente. Hay diferentes técnicas para controlar esto. Aquí vas a explorar la técnica de escribir señales a los servos por separado. Este control lo harás desde tu programa.
Servo controlado con entrada
Vamos a intentar utilizar una entrada para controlar el servo. En este ejemplo vamos a utilizar un potenciómetro.
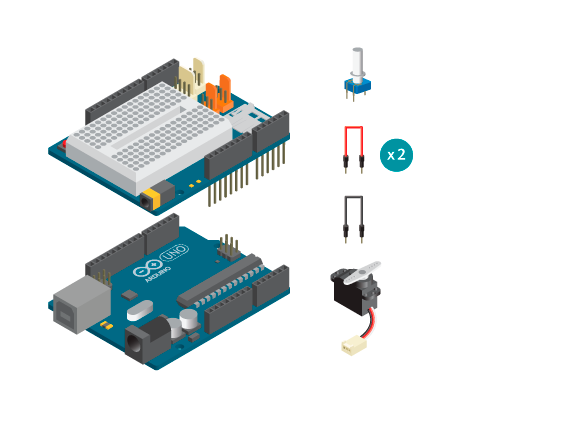
Conecta el Pin central del potenciómetro a la entrada analógica A0. Conecta uno de los otros Pins a 5V y el último Pin a tierra. Conecta un servo estándar al pin D9.
Cámara robótica
¡Espía a tu gato con esta cámara robótica! Monta la cámara espía y contrólala con un pequeño joystick. Puedes dirigir todo desde el ordenador y cuando veas algo sospechoso, ¡hazle una foto!
Abre la caja
Esta es una caja ‘open source’ (o de código abierto) que contiene electrónica libre. Ah, y se abre automáticamente cuando la llamas golpeándola.
Robot gateador
Este pequeño robot puede gatear. Es todo lo que puede hacer, y tampoco es muy bueno en eso, pero es muy bonito y divertido.
Cazador de luz
Este pequeño vehículo tiene la eterna e imposible misión de atrapar la luz. Puedes hacer que te siga enfocándole una luz, la de tu teléfono móvil por ejemplo. Siempre girará a donde esté la luz.
Para el profesor
La Meta de la Semana
Esta semana experimentarás con servo motores. Estos motores, son de muy fácil manejo. Originalmente se usaban en radio control para poder mover mecanismos con una cierta precisión. El ejemplo clásico es el del control de los flaps de un avión o la dirección de un coche.
Para hacer esto, vamos a emplear una librería llamada Servo que, al incluirla en tu programa, permite declarar objetos de ese mismo tipo y que permiten escribir el ángulo al que se deberá posicionar el motor.
Se dejan brevemente explicados otros tipos de motores, si bien es posible encontrar numerosa documentación en línea sobre esos. El objetivo es hacerte lo más fácil posible el controlar motores en el aula.
Si tienes interés por la historia de los servo motores, debieras saber que los motores de giro continuo no existían desde un principio y que surgieron como una modificación de los usuarios sobre los motores estándar.
La primera sesión será de introducción a los conceptos mencionados previamente, mientras que las siguientes consistirán en la realización de uno de los proyectos propuestos por cada grupo.
Hemos creado 5 tipos distintos de robots para hacerte más fácil el montaje. Te darás cuenta de que la complejidad de los programas se ha reducido en mucho para esta semana, esto es así para dar más espacio a que los alumnos experimenten en el aula. Dales libertad para hacer que sus robots se comporten de maneras no previstas en los enunciados de los proyectos.
Formato de las Sesiones
Las clases se desarrollarán en una sala de ordenadores.
Idealmente, en la primera sesión presentarás los conceptos a los alumnos y les invitarás a seguir el ejercicio paso por paso.
Para las otras tres sesiones, los proyectos han sido diseñados para que los alumnos los puedan seguir sin tu intervención más que como dinamizador de los grupos. Como siempre, dejamos este tema abierto para que cada uno decidáis la mejor forma de proceder.
Los proyectos de esta semana están pensados para que los alumnos realicen solo uno y por equipos. Todos los grupos recibirán piezas de madera para realizar un montaje. Hay material suficiente para poder realizar los cinco proyectos diferentes en paralelo.
Para los alumnos aventajados, recomendamos invitarles a experimentar una vez hayan montado el proyecto básico. No debiera de suponer un gran problema trabajar bien con la representación o con las mejoras de código.
Al final de la tercera sesión, deberéis dedicar un tiempo a que cada uno de los grupos presente su proyecto al resto utilizando una serie de tres transparencias:
- Presentación, título, miembros del grupo.
- Explicación del funcionamiento (pueden usar el diagrama de flujo de la página web y añadir sus modificaciones o crear uno nuevo).
- Fotografía del objeto final incluyendo sus modificaciones y demostración.
Podéis descargar un ejemplo de transparencias para lo que sería la realización de un proyecto de un pájaro robot aquí:
Como curiosidad, si queréis ver ese proyecto funcionando, o si queréis mostrar a los alumnos como documentar con un video de 40 segundos como funciona el proyecto, podéis visitar:
Recuerda enviar las transparencias de tus alumnos a castilla.edu AT arduino PUNTO cc.
Importante
- No olvides recordar a tus alumnos que guarden su código en una llave USB o similar
- Invítales a compartir el código, hay herramientas como EtherPad,PiratePad, SketchPad, incluso Google Docs para que puedan pasarse el código unos a otros
- Haz que tus alumnos muestren sus programas a los demás, no tanto desde el punto de vista de la solución técnica, sino desde lo lúdico. Déjales explicar las modificaciones que introducen en el código y la construcción de los mismos
- Colecciona las presentaciones y envíalas a castilla.edu AT arduino PUNTO cc
- Pide a los alumnos que, al principio de la semana, empleen cinco minutos en la encuesta especial para alumnos sobre la semana anterior (te enviaremos el formulario por correo electrónico)
Materiales
Si quieres descargar todos los materiales de Arduino para la clase, incluyendo el código actualizado a la última versión, haz click aquí.
Si estás familiarizado con GitHub te puede interesar trabajar haciendo un fork del repositorio de código aquí. Lo puedes usar para hacer propuestas de cambios a los proyectos, correcciones ortográficas, etc.
Si quieres que alguno de los proyectos de tus alumnos reciba una atención especial y se publique en el Arduino blog, envía un mail acastilla.edu AT arduino PUNTO cc.
Los materiales podrían cambiar semana a semana, se os informará por correo electrónico de ser necesario descargar una versión nueva de los mismos.