This little vehicle is on an impossible, never ending mission to catch the light. You can make it follow you by pointing a flashlight at it, e.g., the one on your mobile phone. It will always turn towards the light.
Materials
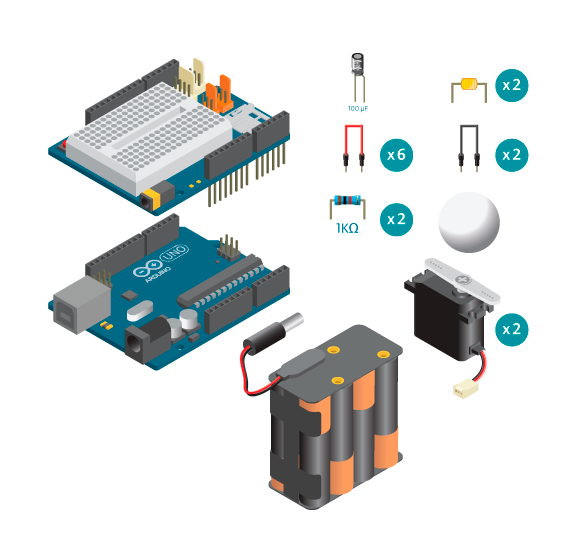
- 1 Arduino Uno board
- 1 Education Shield
- 2 LDRs
- 2 continuous rotation servos
- 2 1k ohm resistors
- 1 100 µF capacitor
- 2 black jumper wires
- 6 colored jumper wires
- 8 AA batteries
- 1 AA battery holder
- 1 power plug
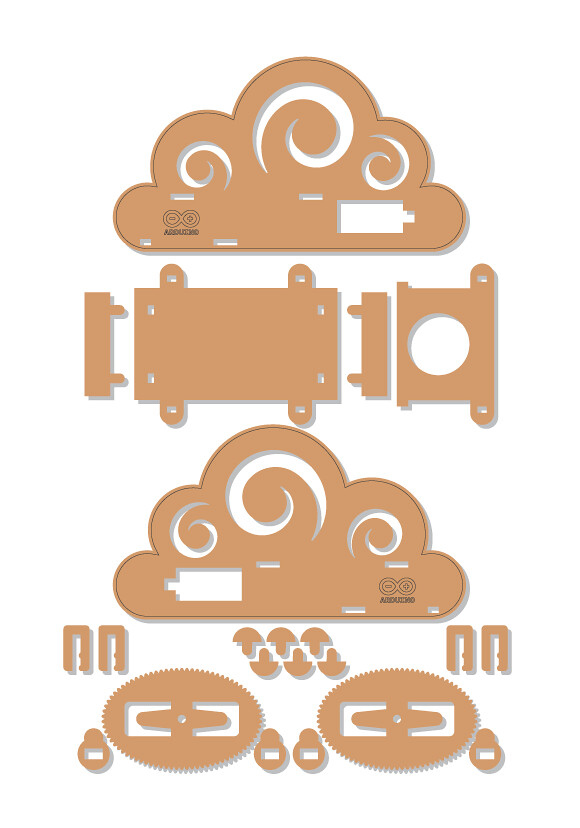
- Light Chaser kit
- 1 ping pong ball
Instructions
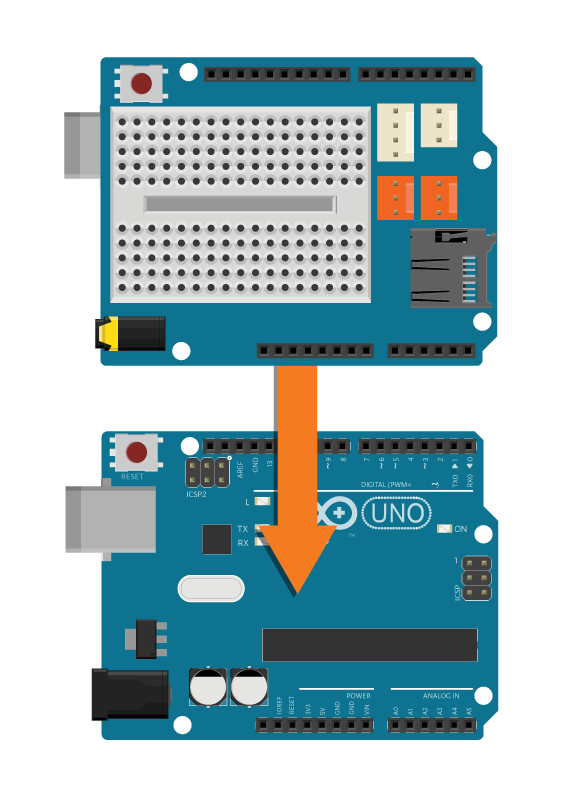
- Attach the shield onto the top of the Arduino board.
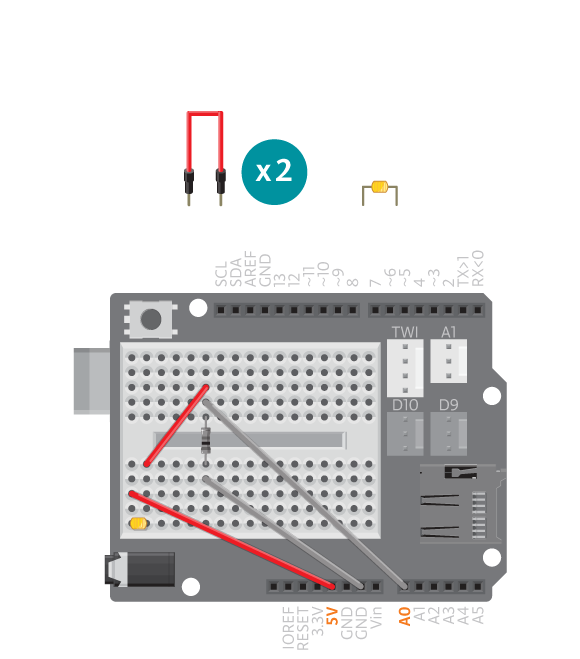
- Connect a 1K ohm resistor across the breadboard gap. Connect one leg to analog pin A0 and the other to GND.
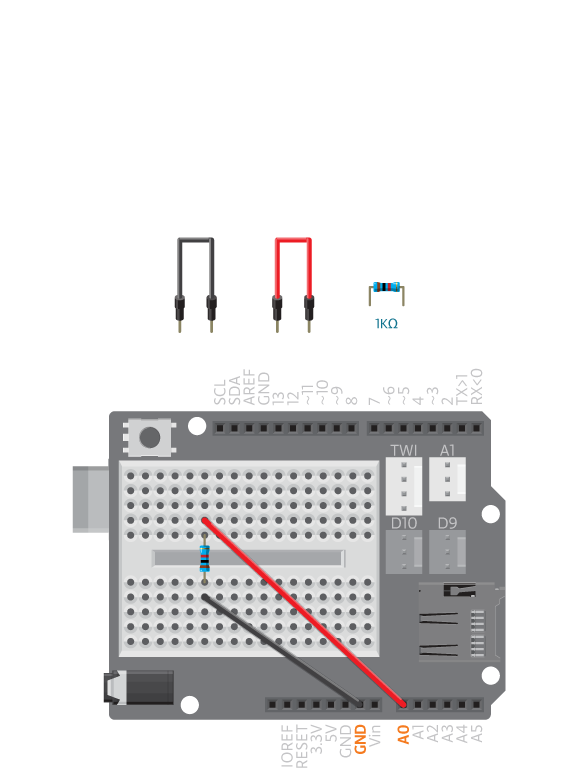
- Connect an LDR between analog pin A0 and 5V. Place it on the left side of the Light chaser.
- Connect another 1K resistor across the breadboard gap. Connect one leg to A2 and the other to GND.
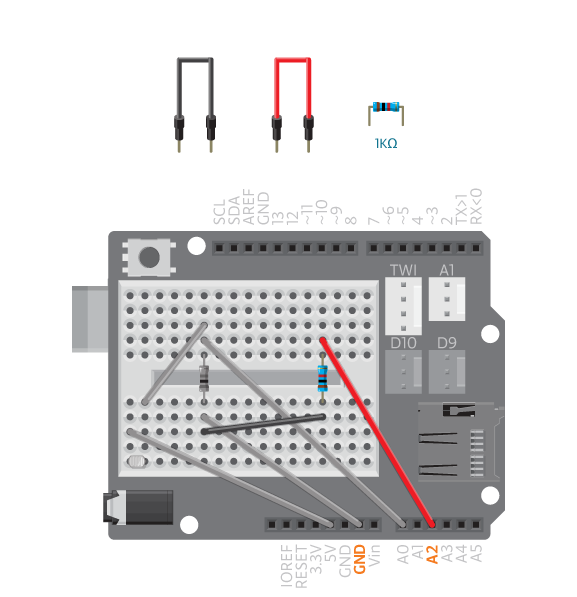
- Connect a second LDR between A2 and 5V. Place it on the right side of the Light chaser.
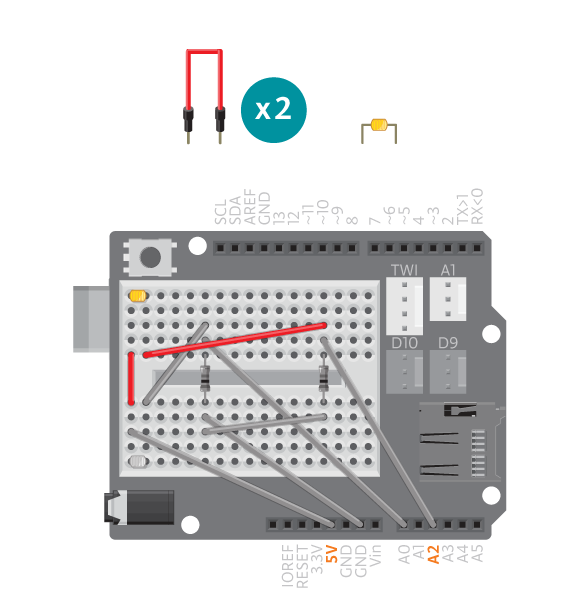
- Connect the 100 µF capacitor between GND and 5V. Connect the short leg to GND and the long one to 5V.

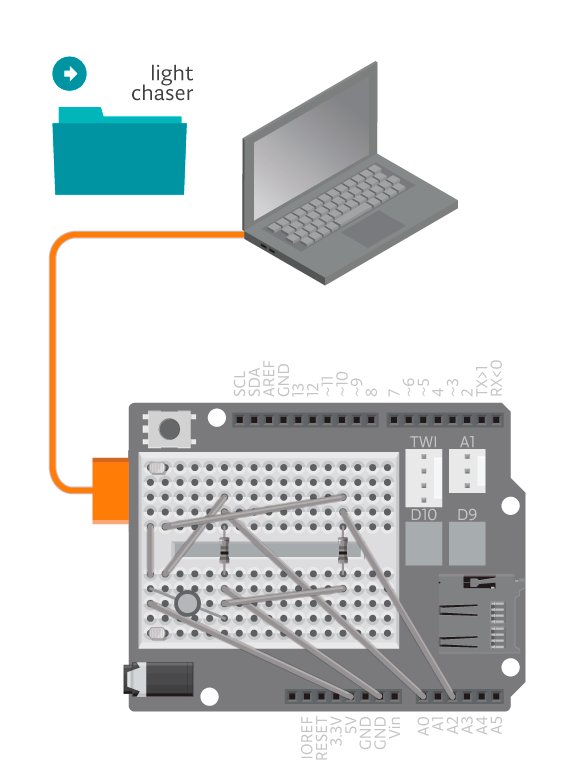
- Connect the assembly to the computer and upload the example ‘LightChaser’.
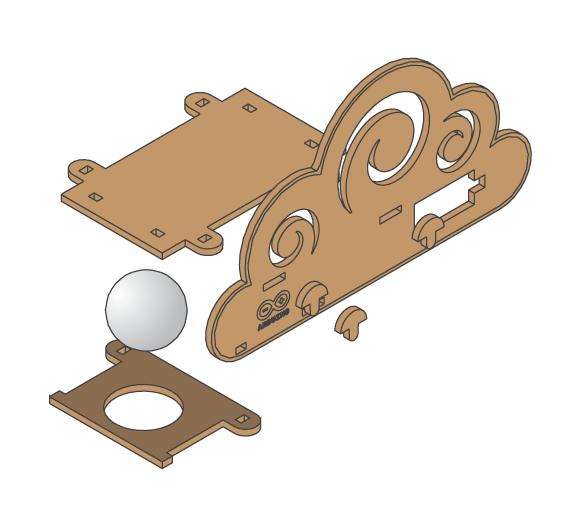
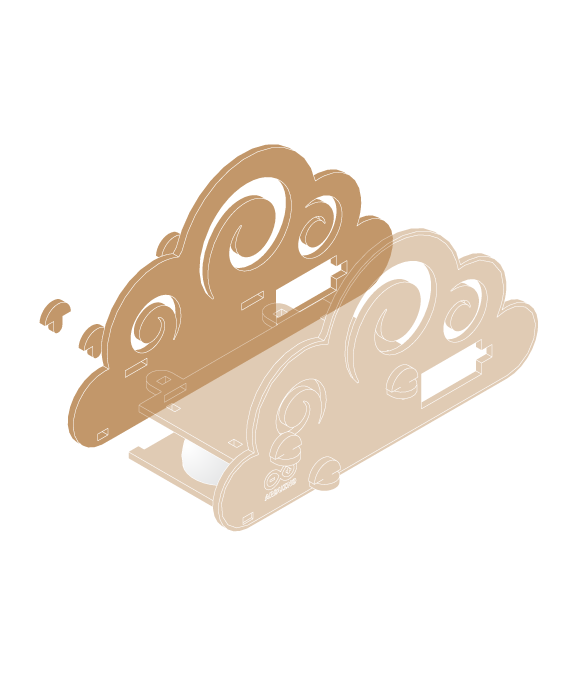
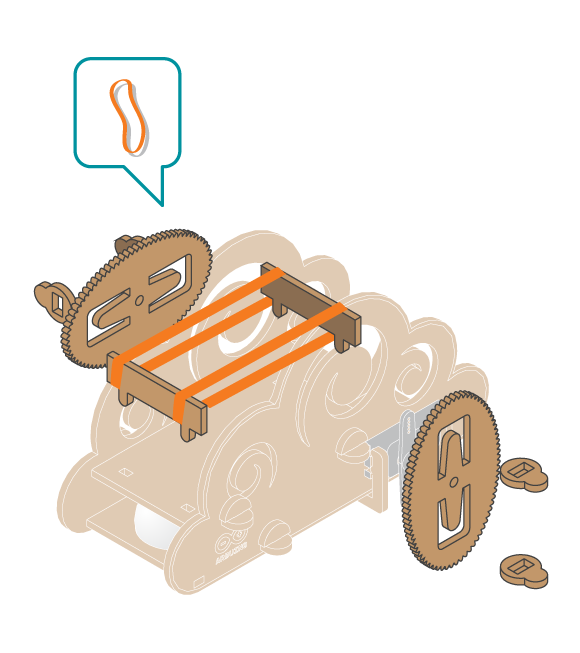
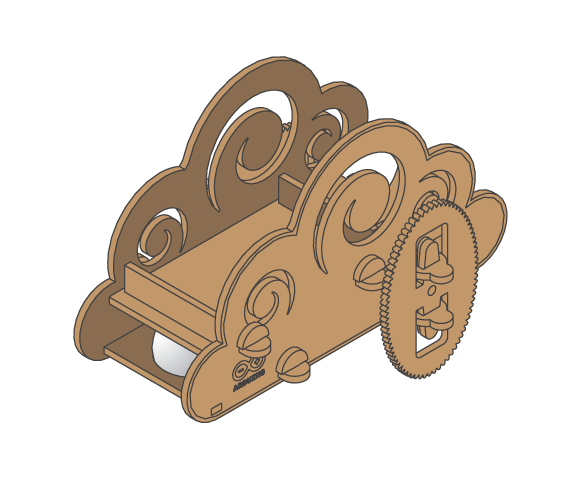
- Assemble the Light chaser.

- Connect the left continuous rotation servo to D10.
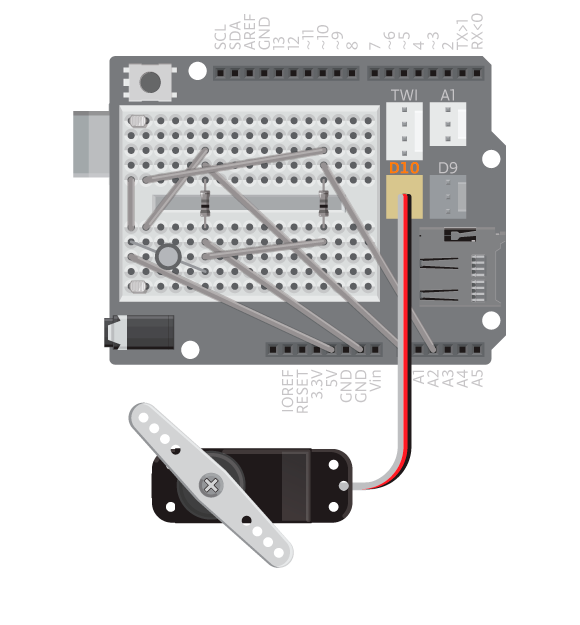
- Connect the right continuous rotation servo to D9.

- Place the electronics in the Light chaser. Make the LDRs point outward from the vehicle.

- Place the batteries in the battery holder and use a power plug to connect it to the Arduino power socket.

Code
Find the code in File>Examples>EducationShield>Block4-Robots>Projects>LightChaser
How it works
- The EducationShield and Servo libraries are included.
- The Wheels and LDR objects are declared,
wheels,sensorLeftandsensorRight - In
setup(), the sensors and servo are configured and initialized. - In
loop(), ifsensorLeft.getState()istrue, it means that the left sensor is detecting strong light so wheels is controlled to turn left. - Else if
sensorRight.getState()istrue,wheelsis instead controlled to turn right. - If neither of the sensors are detecting strong light,
wheelsis controlled to move forward. loop()continues to loop.
Troubleshooting
- Refer to the illustration and double check your connections. Make sure the shield and jumper wires are firmly connected.
- If the light chaser is not turning towards light, see LDR reference about how to debug LDRs.
- If the motors are not working or the Light chaser is not going straight, see the reference about how to debug servo motors.
Learn by doing
- You can turn it into a “Vampire Vehicle” so that it runs away from light.
- Modify the example so the Light chaser only moves when there is a light pointed at it.