Linjeföljaren gör precis det som namnet antyder, den följer en linje. Få den att gå dit du vill, genom att visa vägen med en 3 cm bred, svart linje.
Material
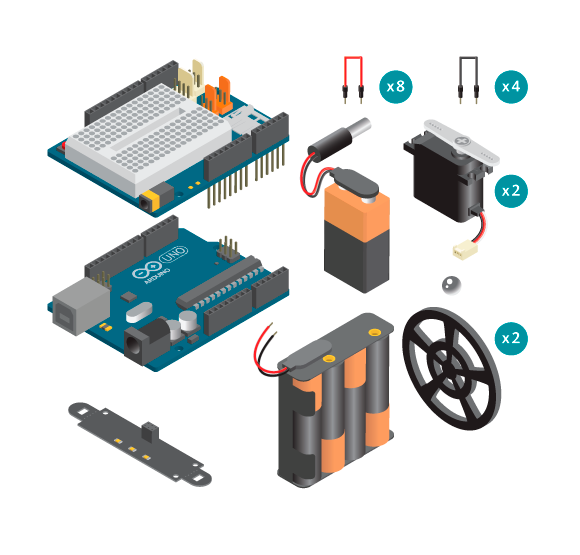
- 1 Arduino Uno
- 1 Education-sköld
- 1 IR-Array
- 2 servon med kontinuerlig rotation
- 4 svarta labbkablar
- 8 färgade labbkablar
- 1 9V-batteri
- 4 AA-batterier
- 1 AA-batterihållare
- 2 strömkontakter (En utan plugg men med två lösa kablar)
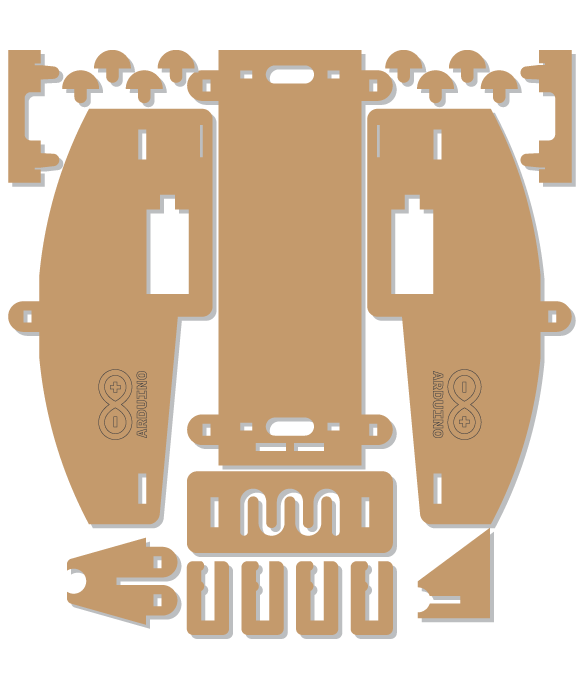
- Linjeföljare-kit
- 1 metallboll
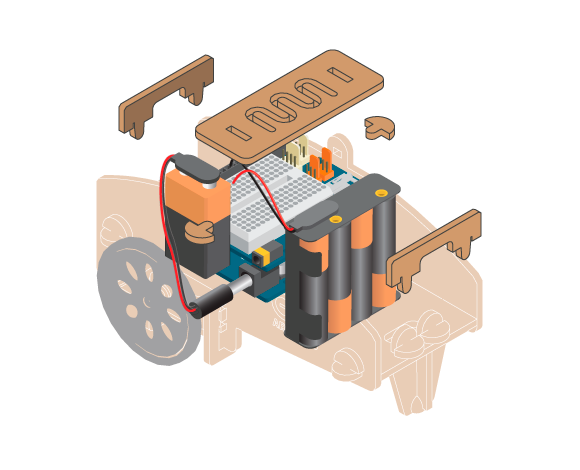
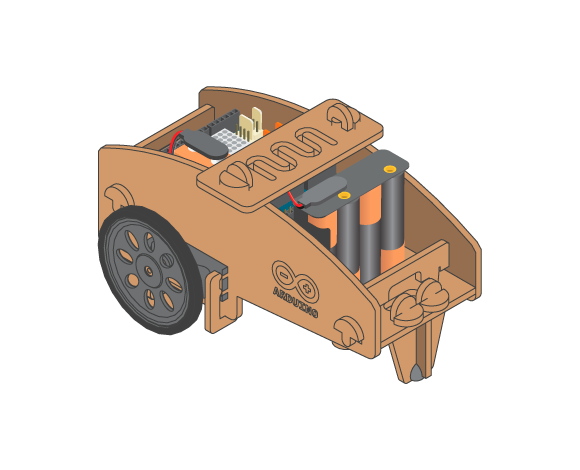
Instruktioner
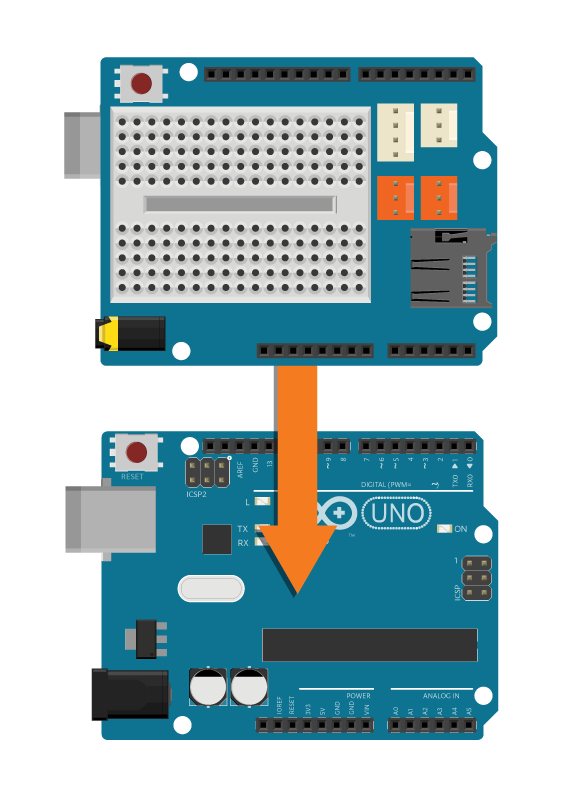
- Fäst skölden på Arduinons ovansida.
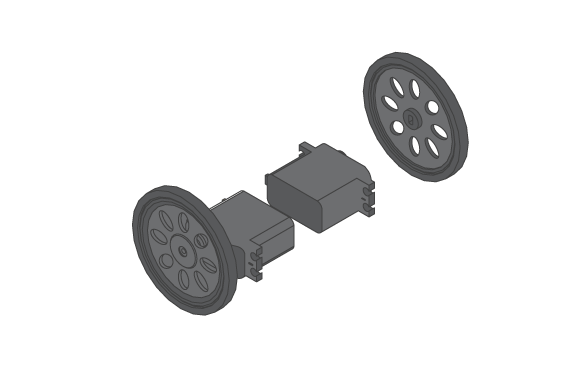
- Fäst hjulen på servorna.
- Fäst en servo på varje sida av Linjeföljaren.
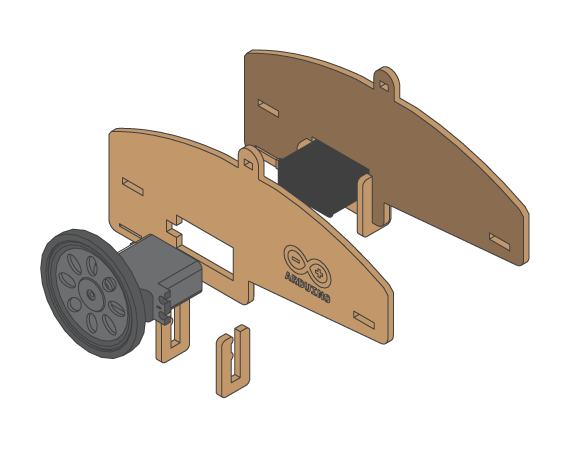
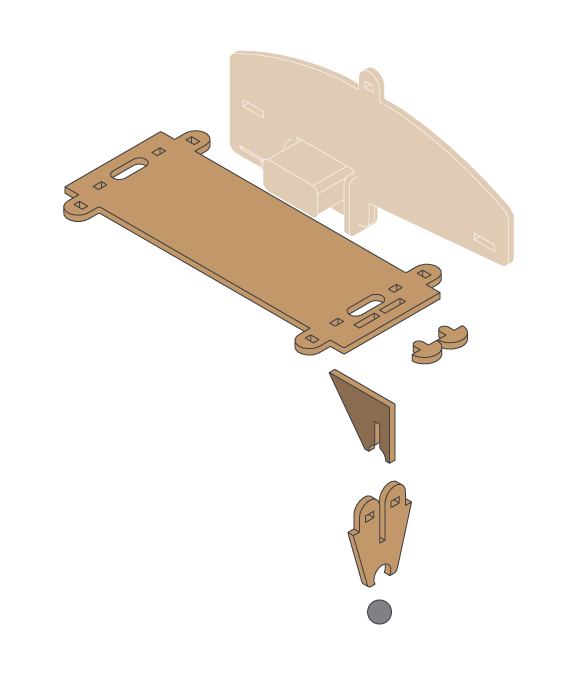
- Montera bollen på Linjeföljarens mittersta del.
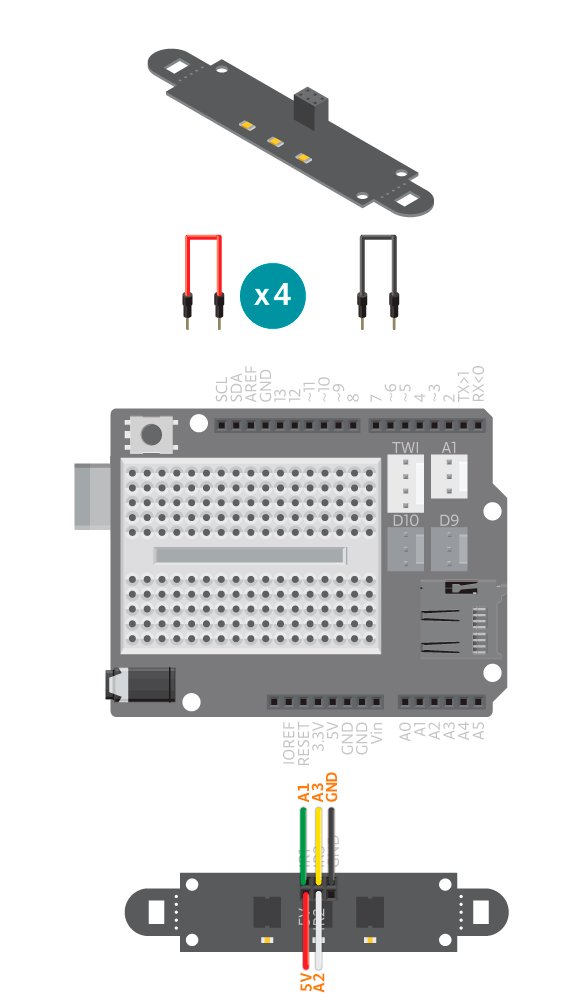
- Koppla fem labbkablar till 5V, GND, IR1,IR2 och IR2 på IR-Arrayn.
- Trä labbkablarna genom det främre hålet av mittenbasen, och avsluta sedan monteringen av huvudkroppen.

- Koppla de lösarna kablarna på IR-Arrayn. 5V till 5V, GND till GND med en extra labbkabel, IR1 till A1, IR2 till A2 och IR3 till A3.

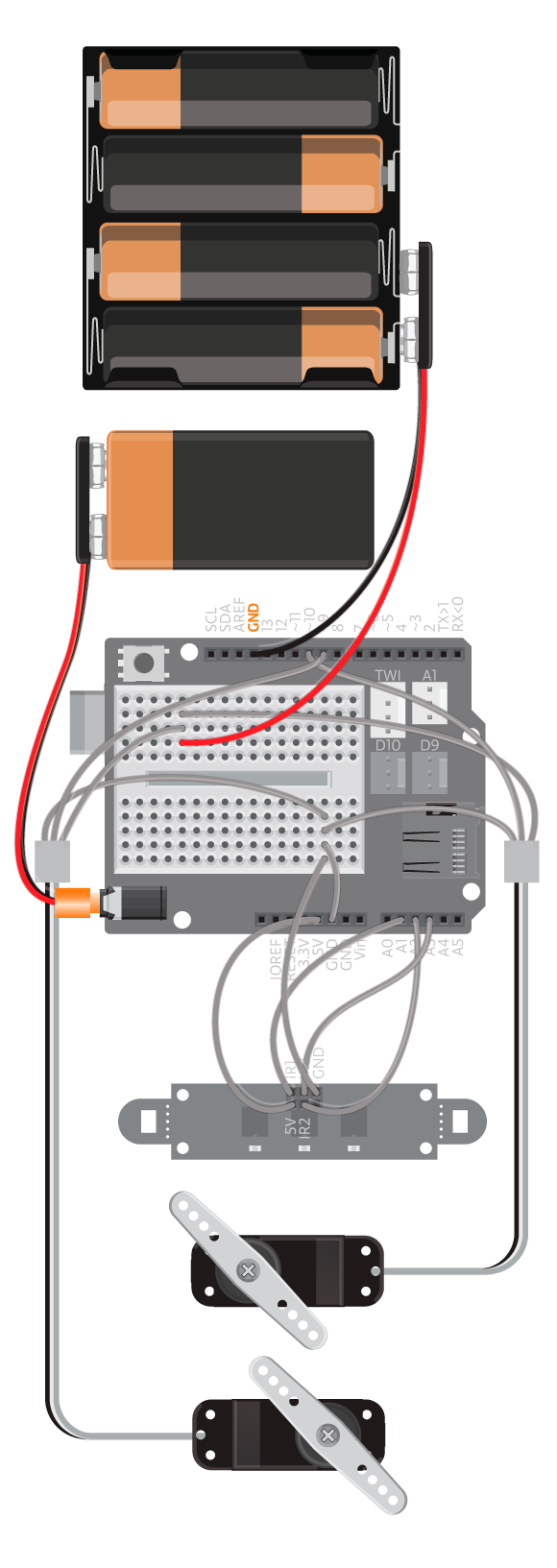
- Använd tre labbkablar för att koppla den vänstra servon. Den svarta kabeln till GND, den vita kabeln till digitala pin 10, och den röda kabeln till kopplingsdäcket.

- Använd 3 labbkablar och koppla den högra servon. Den svarta kabeln till GND, den vita kabeln till digitala pin 9, och röda kabeln till kopplingsdäcket.

- Koppla Arduinon till datorn och ladda upp exemplet ’LineFollower’.

- Placera 4 AA-batterier i batterihållaren. Använd strömkontakten med lösa kablar och koppla batteriet till Arduinon, svarta kabeln till GND och röda kabeln till de två servornas strömkablar på kopplingsdäcket. Koppla 9V-batteriet till Arduinons strömkontakt.
- Placera elektroniken på ovansidan av Linjeföljaren.
Kod
Hitta koden i File>Examples>EducationShield>Block4-Robots>Projects>LineFollower
Så fungerar det
- EducationShield- och Servo-biblioteken inkluderas.
- IRArray- och Wheel-objekten deklareras,
irochwheel. - I
setup()initialiseras hjulen. - Programmet pausas i 1000 millisekunder.
- I
loop()deklareras variabeln dir och tilldelas det avlästa värdet från IR-arrayn, medreadLine(). Värdet kommer vara mellan -100 och 100 och representerar riktningen dit den svarta linjen är på väg. wheelsstyrs till att följa värdet avdir.loop()fortsätter upprepas.
Problemlösning
- Hänvisa till illustrationen och dubbelkolla dina kopplingar. Var noga med att skölden och labbkablarn kopplats ordentligt.
- Om motorerna inte fungerar, se referenssidan för hjul.
- Om fordonet inte följer linjen, se referenssidan för IR-array.
Lär genom att göra
- Skriv ut en bana av svarta linjer och bygg hinder för roboten. Om hindren är för svåra, se om det går att förbättra robotens prestation genom att modifiera hjulen.
- Få roboten att reagera på något sätt när den bara ser vitt. Med andra ord, när den tappat bort den svarta linjen.