Det här är en helt vanlig kittlig robot i gungstol. Eller förresten, det finns nog inget vanligt med det egentligen. När du kittla roboten på hjärtat börjar den vifta med armar och ben.
Material
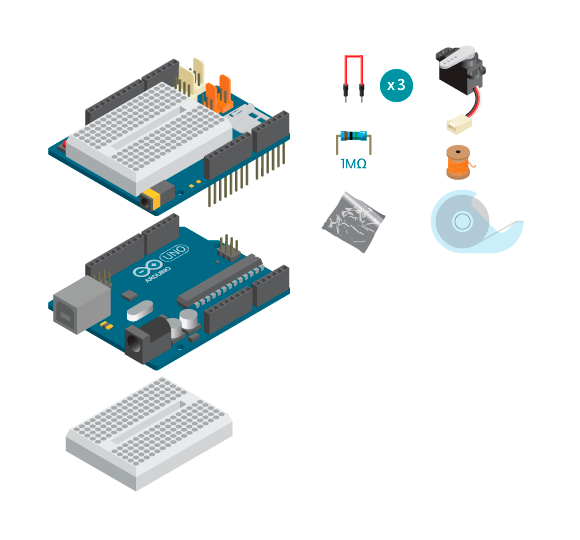
- 1 Arduino Uno
- 1 Education-sköld
- 1 kopplingsdäck
- 1 standardservo
- 1 1M ohms resistor
- 3 labbkablar
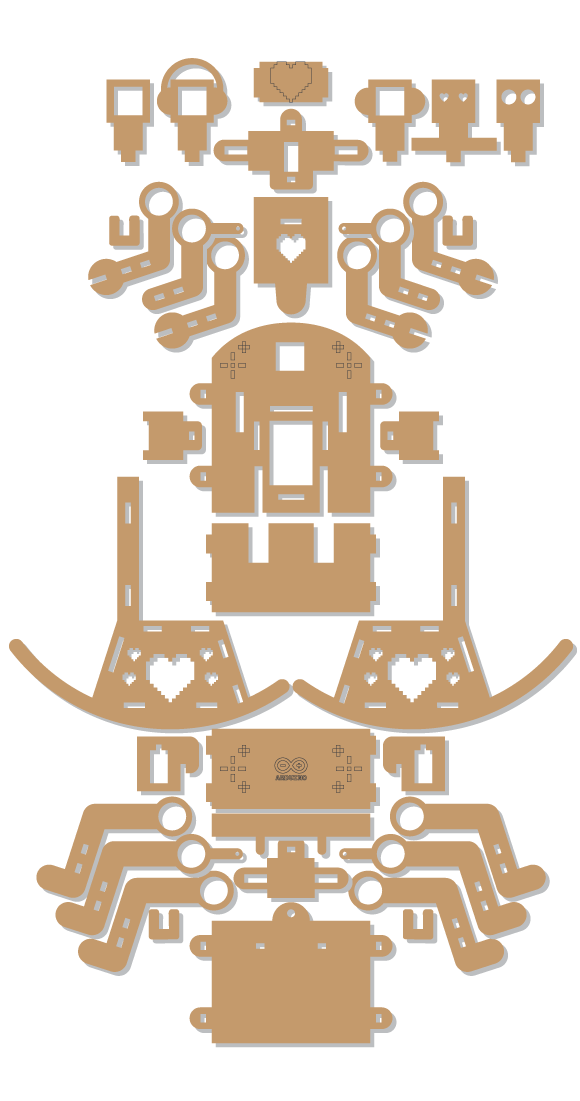
- robot-kit
- Aluminiumfolie
- Maskeringstejp
- Tråd
Instruktioner
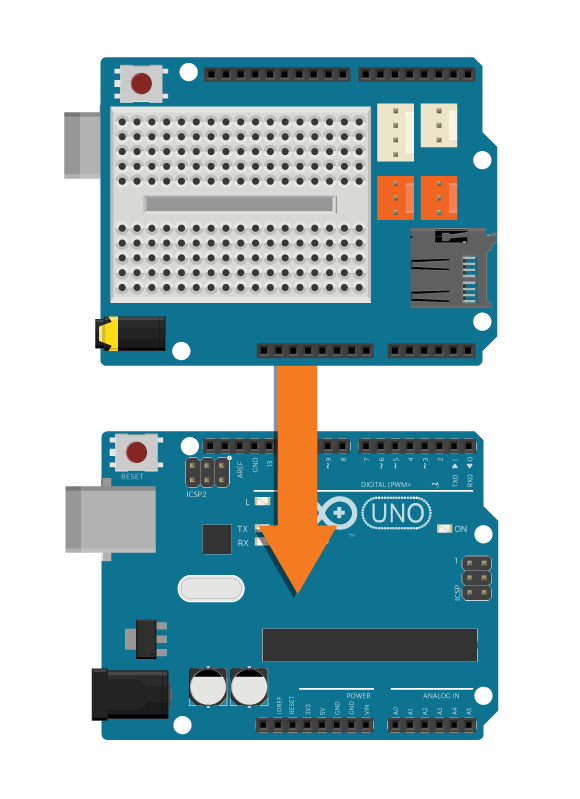
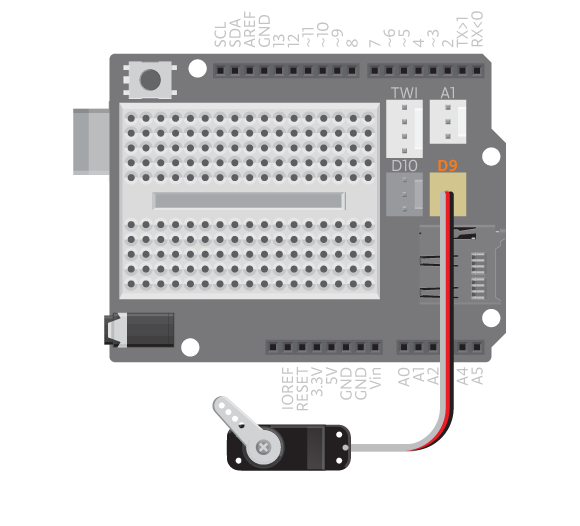
- Fäst skölden på Arduinons ovansida.
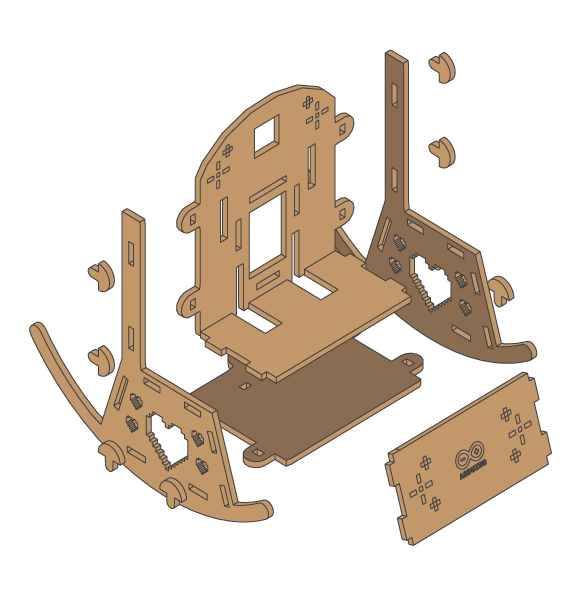
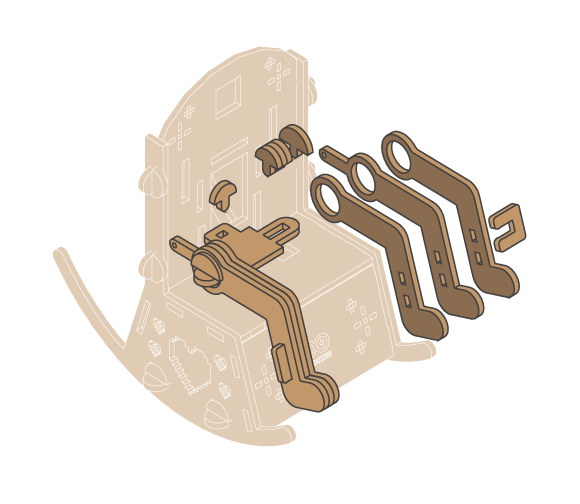
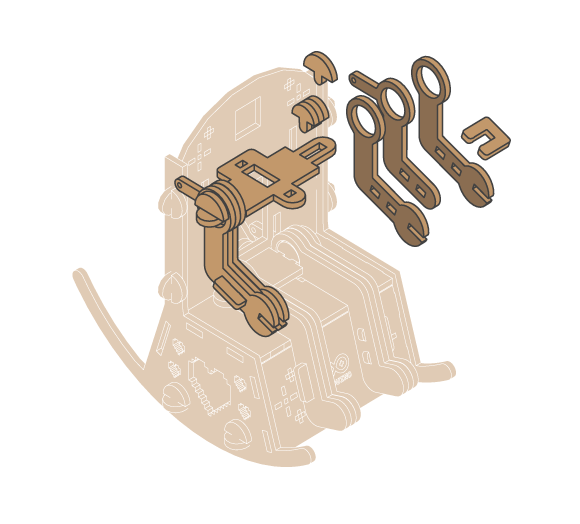
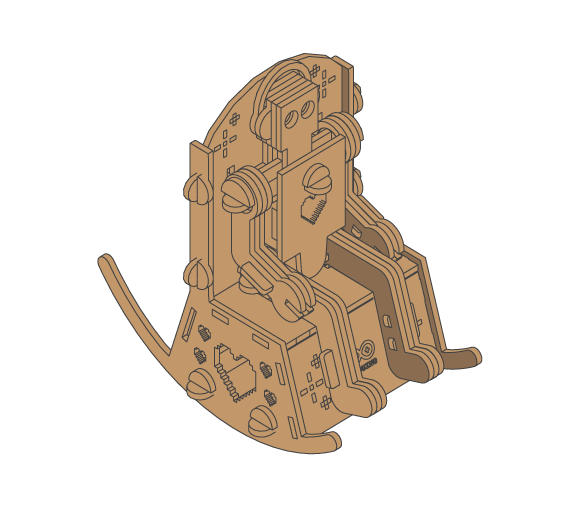
- Montera den kittliga roboten.

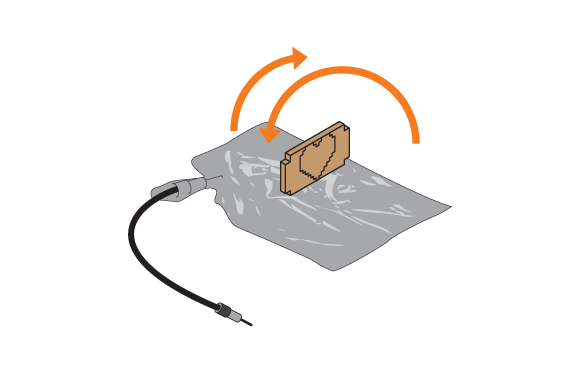
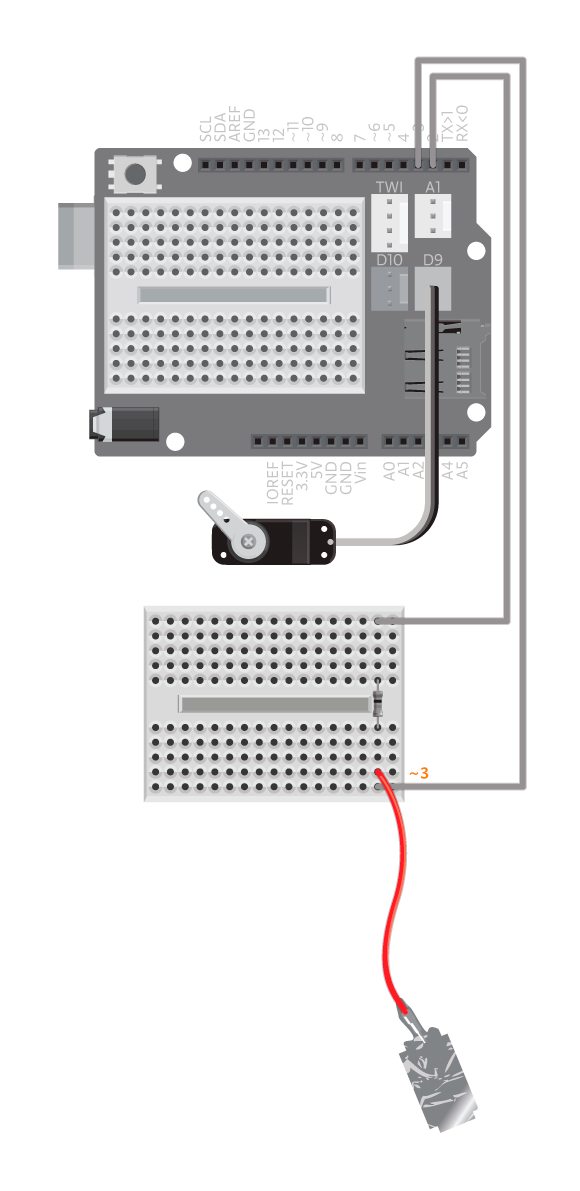
- Gör en kapacitiv sensor genom att skära ut en 5 x 5 cm stor fyrkant av aluminiumfolie. Linda foliet runt hjärtat, använd maskeringstejp runt kanterna för att hålla ihop det. Linda folie runt en labbkabel, från baksidan av hjärtat. Metallen på kabeln måste vara i kontakt med foliet.
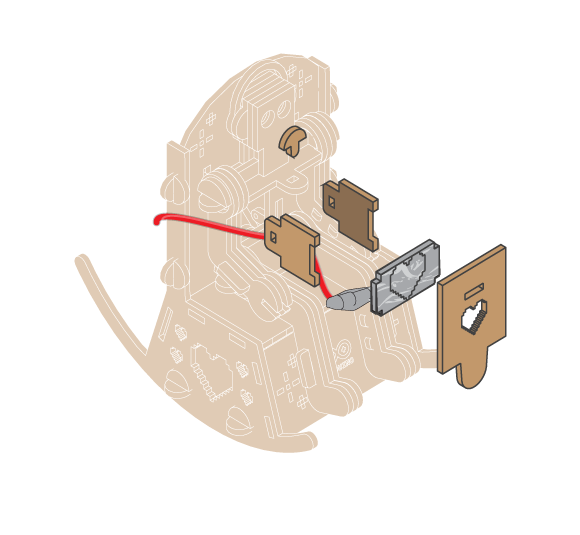
- Koppla servon till D9.
- Koppla en 1M ohms resistor mellan digital pin 2 och 3 via ett separat kopplingsdäck.
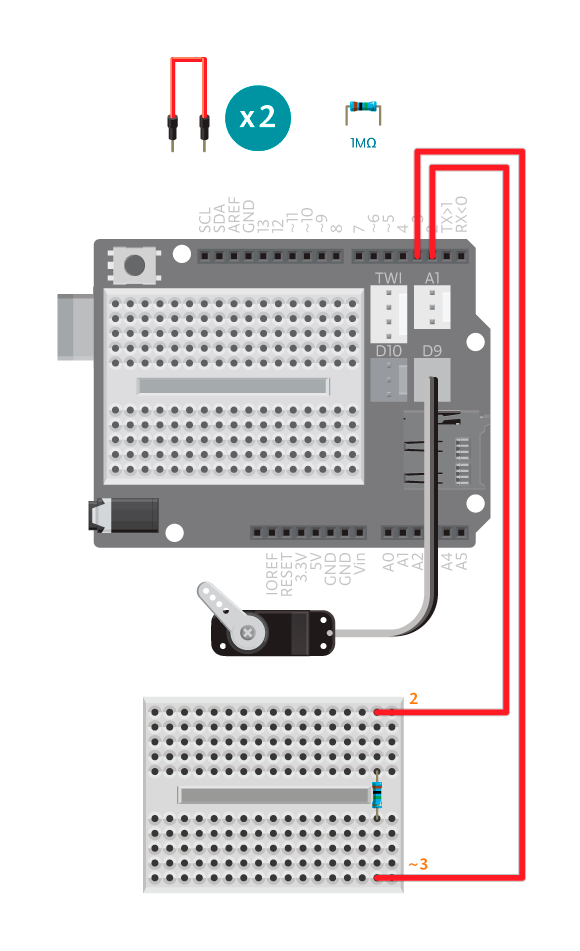
- Koppla den lösa labbkabeln på den kapicativa sensorn till digitala pin 3, via kopplingsdäcket.
- Koppla Arduinon till datorn och ladda upp exemplet ’TickleRobot’. Se till sp att att servon rör på sig när du rör vid aluminiumfoliet.

- Placera elektroniken på inuti den kittliga roboten.
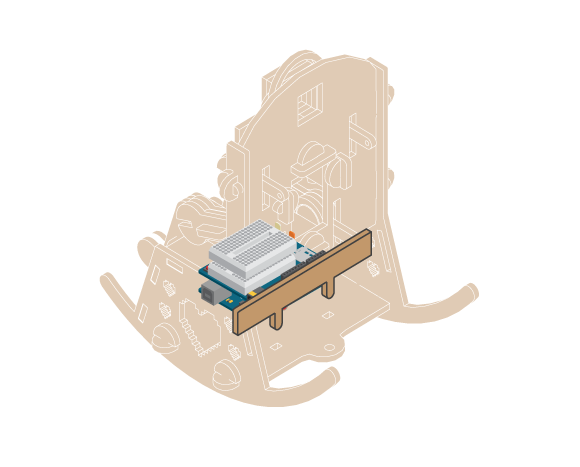
- Placera servon på den vänstra sidan.
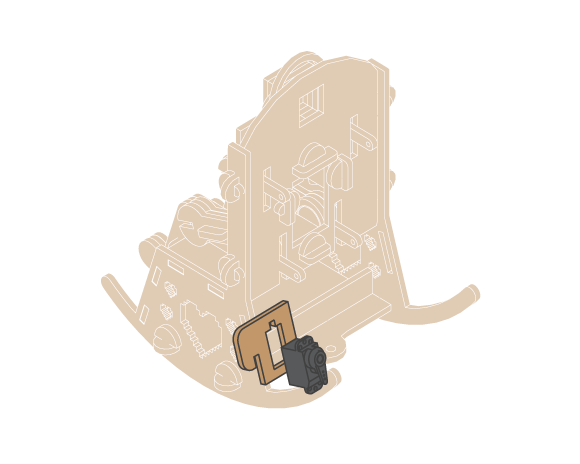
- Vrid på servo-armen för hand åt ett håll, så långt det går. Vrid den sedan därifrån till 90 grader. Ta loss armen och sätt tillbaka den så att den går längs med servon.

- Knyt en tråd från den vänstra armen och benet till servo-armen. Gör samma sak med den högra armen och benet.
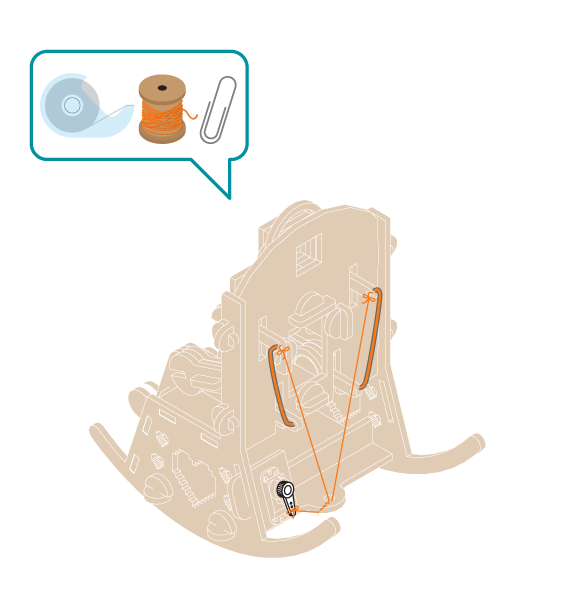
- Din robot är redo att bli kittlad.
Kod
Hitta koden i File>Examples>EducationShield>Block4-Robots>Projects>TickleRobot
Så fungerar det
- EducationShield-, Servo- och CapacitiveSensor-biblioteken inkluderas.
- Servo- och CapacitiveSensor-objekten deklareras,
pullochsensor. - I
setup()konfigureras och initialiseras sensorn och servon. - I
loop()kollas om det avlästa värdet från sensor är sant. Det betyder i så fall att den kapicativa sensorn har vidrörts och servo-positionen sätts då till 0 grader, så att den drar i trådarna. - Om det avlästa värdet inte är sant, sätts servo-positionen till 90 grader så att den slutar dra i trådarna.
- Programmet pausas i 30 millisekunder.
loop()fortsätter upprepas.
Problemlösning
- Hänvisa till illustrationerna och dubbelkolla dina kopplingar. Var noga med att skölden och labbkablarna kopplats ordentligt.
- Om roboten inte reagerar på kittling, eller om servon inte rör sig till rätt vinkel, se referenssidan för standardservo.
- Om det fortfarande inte fungerar, se referenssidan för kapacitiv sensor.
Lär genom att göra
- Programmera en danskoreografi för roboten och få den att dansa när hjärtat har vidrörts.
- Lägg till en till servo så roboten kan göra mer avancerade dansrörelser.
- Få roboten att gunga stolen av sig själv. Använd den kapicativa sensorn för att sätta igång och stänga av.