Att bygga robotar som rör sig på två hjul är ganska vanligt. TIll detta behöver du två servos med kontinuerlig rotation. Vd plötsliga svängar drar två servos mer ström än vad Arduinon kan hantera. För att lösa det problemet behövs en kondensator, och när hjulen ändrar riktning behöver det göras gradvist. Använder du Wheel-funktionerna i biblioteket behöver du inte tänka på att ändra riktningen gradvis, det görs nämligen de inbyggda funktionerna.
Material

- 1 Arduino Uno
- 1 Education-sköld
- 2 servos med kontinuerlig rotation
- 1 100 µF kondensator
- 2 labbkablar
Instruktioner
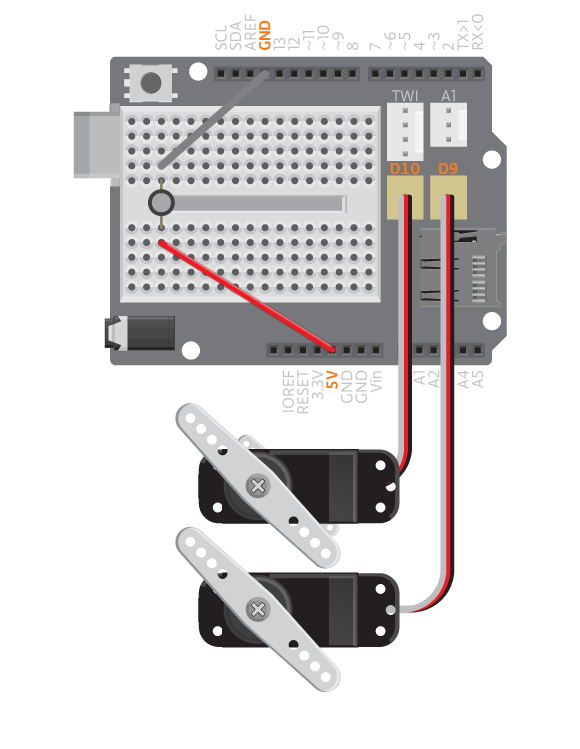
- Fäst skölden på Arduinons ovansida.
- Koppla det vänstra hjulets servo till D10 och det högra hjulets servo till D9.
- Koppla en kondensator mellan GND och 5V, korta benet till GND och långa benet till 5V.
- Koppla Arduinon till datorn och ladda upp exemplet ‘Wheels’
Kod
Hitta koden i File>Examples>EducationShield>Help>Wheels
Hjulen bör nu rotera och ändra riktning varannan sekund.
Kommandon
Wheels( leftServoPin, rightServoPin)– skapar ett Wheel-objekt.- Parametrar
- (
int)leftServoPin– den digitala pin till vilken den vänstra servon är kopplad. Standardvärdet är 10. -
(
int)rightServoPin- den digitala pin till vilken den högra servon är kopplad. Standardvärdet är 9.
- (
- Parametrar
-
begin()– initialiserar servohjulen. Måste anropas i setup(). -
goForward()- får båda servos att snurra framåt. -
goBackwards()- får båda servos att snurra bakåt. -
turnLeft()- får båda servos att snurra i motsatt riktning så att fordonet svänger vänster. -
turnRight()- får båda servos att snurra i motsatt riktning så att fordonet svänger höger. standStill()- får båda servos att stanna.
Övriga kommandon
follow( direction )– styr båda servos så att fordonet följer en viss riktning. Använd tillsammans med IRArray-funktionenreadLine().- Parametrar
- (
int)direction- riktningen som fordonet ska följa. Kan vara ett värde från -100 till 100
- (
- Parametrar
Problemlösning
- Var noga med att båda servos är kopplade till de pins som angetts i koden.
- Var noga med den första digitala pin som angetts i begin(left, right) är den där det vänstra hjulet är kopplat, och den andra dör det högra hjulet är kopplat. Om detta blir fel kommer din robot att gå baklänges när den ska gå framåt, o.s.v..