Denna lilla robot kan krypa. Det är allt den kan göra, och den är inte jättebra på det. Men den är supersöt och väldigt rolig!
Material
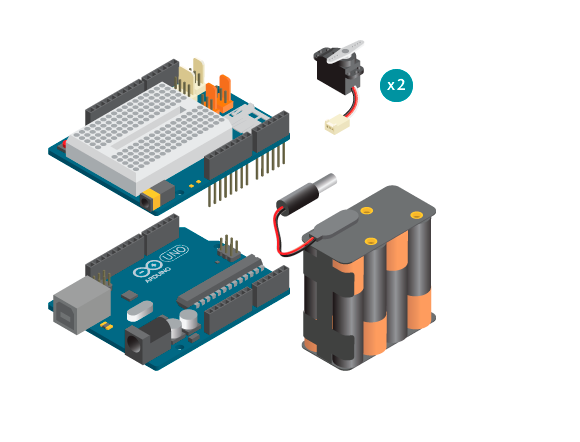

- 1 Arduino Uno
- 1 Education-sköld
- 2 standardservon
- 8 AA-batterier
- 1 AA batterihållare
- 1 strömkontakt
- 1 robot-kit
Instruktioner
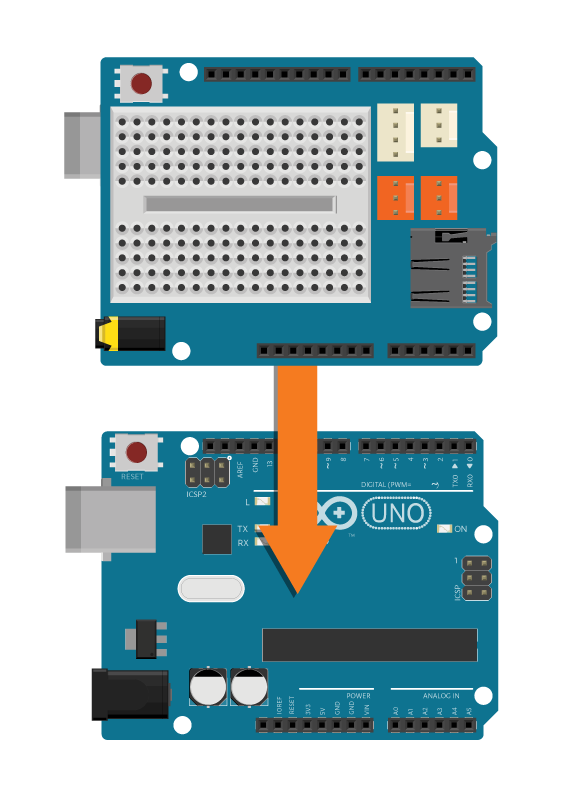
- Fäst skölden på Arduinons ovansida.
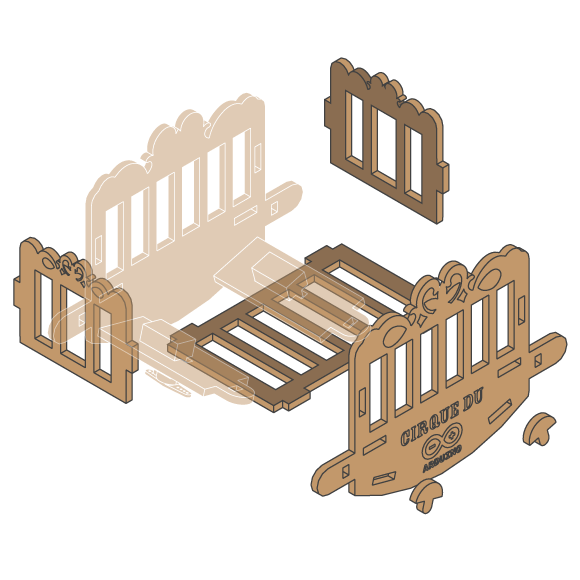
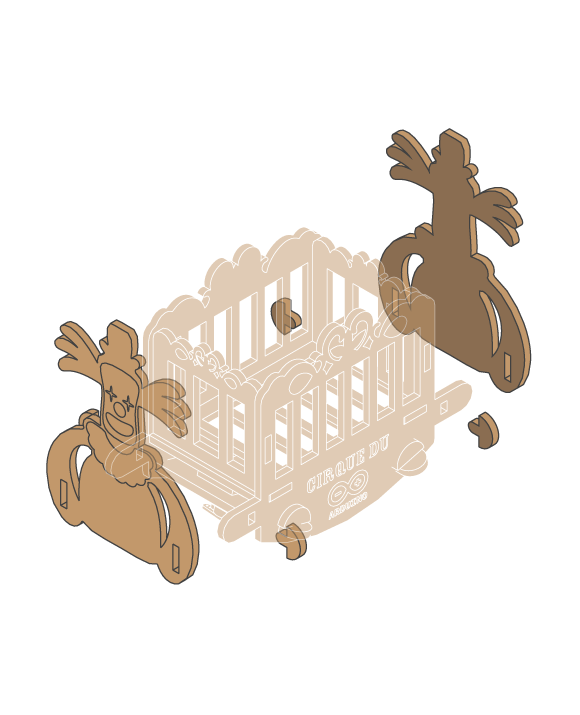
- Montera den krypande roboten.
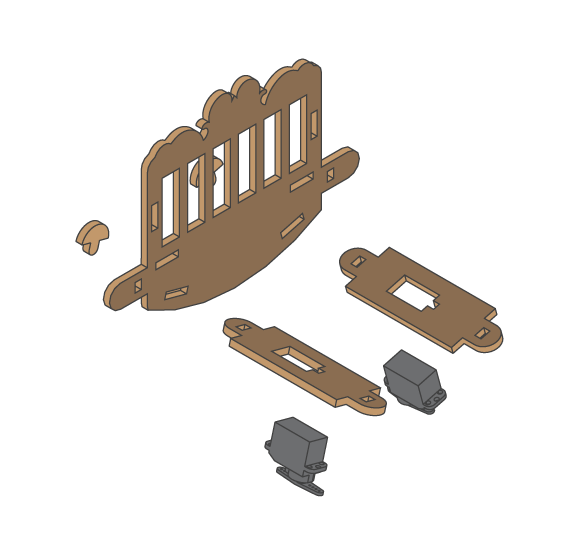
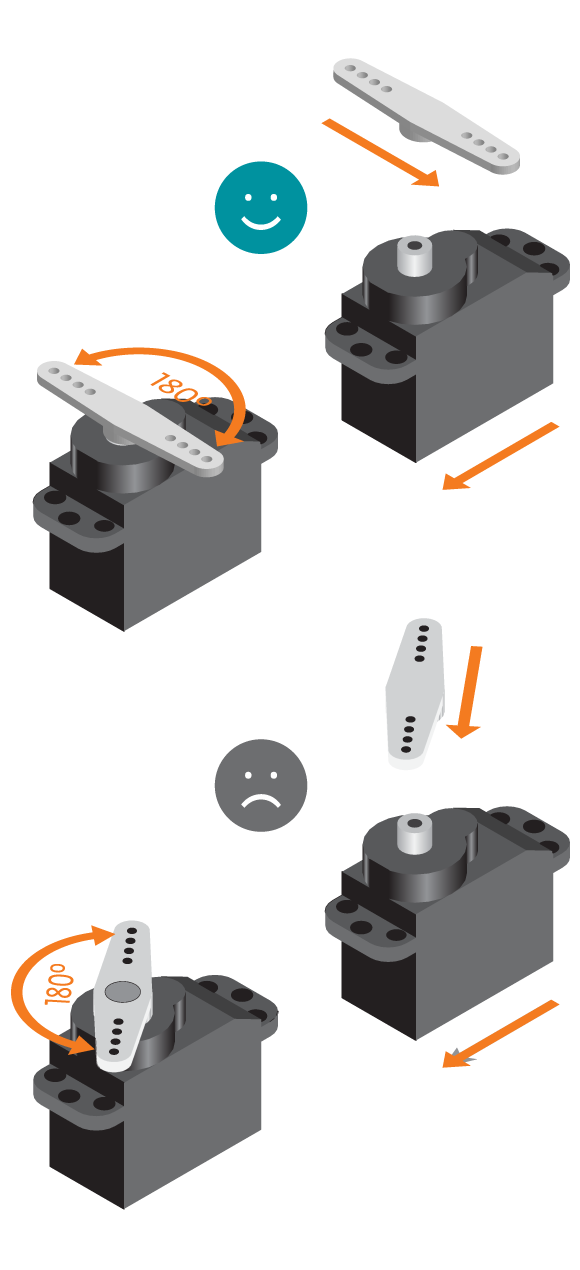
- Vrid på servo-armen för hand åt ett håll, så långt det går. Vrid den sedan därifrån till 90 grader. Ta loss armen och sätt tillbaka den så att den går längs med servon. Gör samma sak med den andra servon.
- Montera varje servo i ett hål och fäst clownbenen i servons axel.
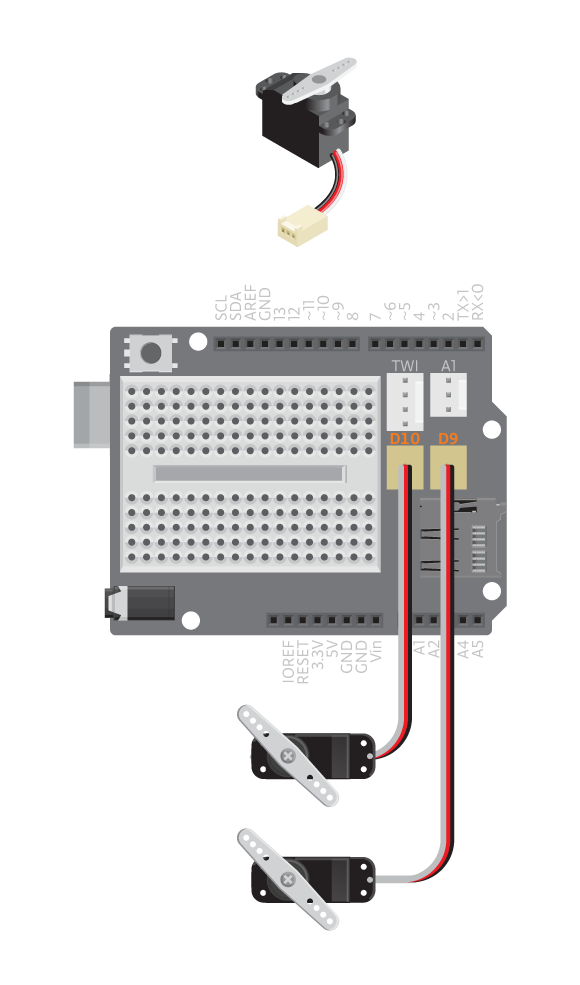
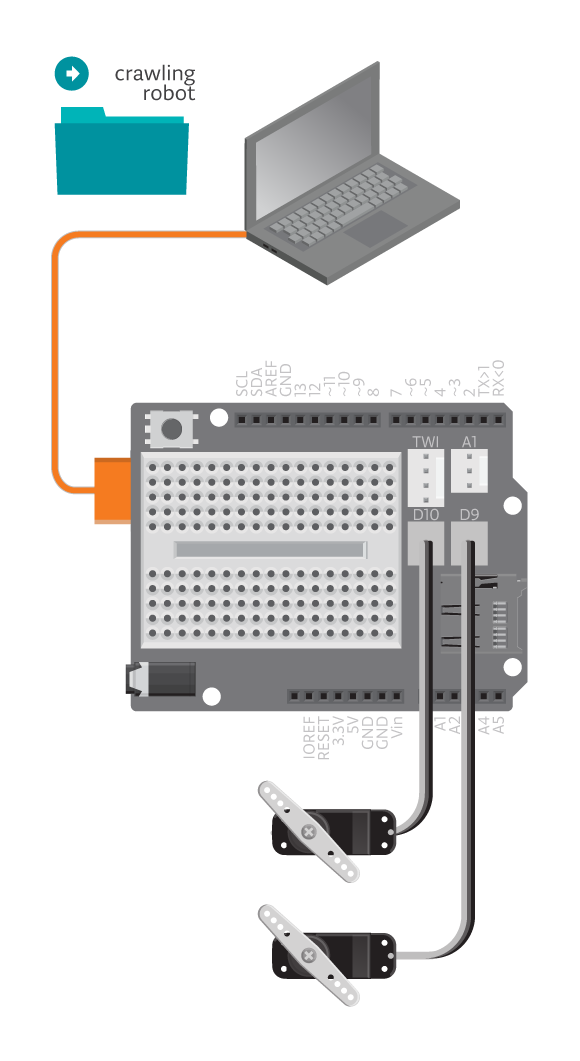
- Koppla den ena servos till D9 och den andra till D10.
-
Koppla konstruktionen till datorn och ladda upp exemplet ’CrawlingRobot’.
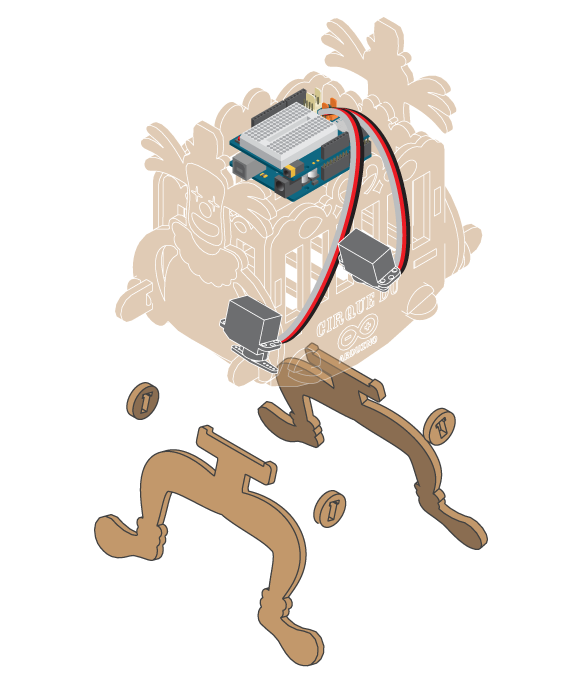
- Koppla ur din Arduino från datorn och placera den i kroppen på den krypande roboten.
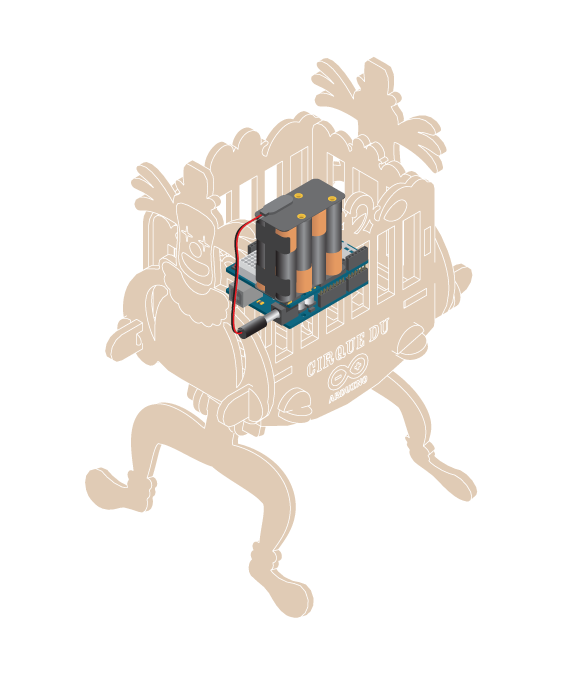
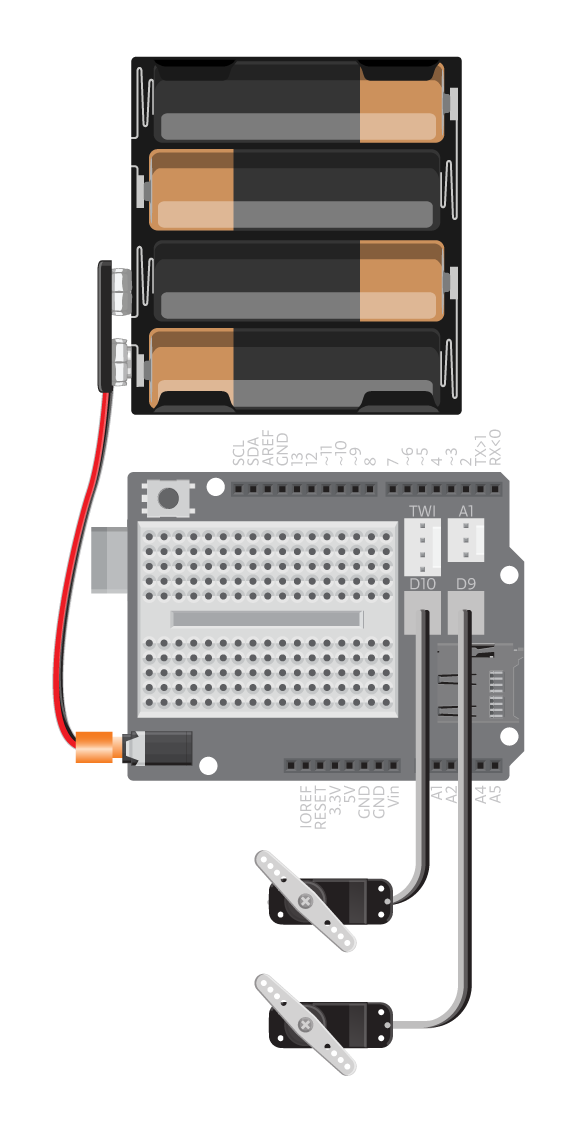
- Placera batterierna i batterihållaren och koppla den till Arduinons strömkontakt.
Kod
Hitta koden i File>Examples>EducationShield>Block4-Robots>Projects>CrawlingRobot
Så fungerar det
- EducationShield- och Servobiblioteken inkluderas.
- Servo-objekten deklareras.
- I
setup()initialiseras Servo-objekten. - Fram-servons position sätts till 110 grader.
- Programmet pausas i 200 millisekunder.
- Bak-servons position sätts till 70 grader.
- Programmet pausas i 200 millisekunder.
- Fram-servons position sätts till 70 grader.
- Programmet pausas i 200 millisekunder.
- Bak-servons position sätts till 110 grader.
- Programmet pausas i 200 millisekunder.
loop()fortsätter upprepas.
Problemlösning
- Hänvisa till illustrationerna och dubbelkolla dina kopplingar. Var noga med att skölden och labbkablarna är ordentligt kopplade.
- Servorna kanske inte fungerar. Testa om de fungerar när Arduinon är inkopplad till datorn istället för batteriet. Om så är fallet, testa med att byta ut batteriet.
- Om det fortfarande inte fungerar, se referenssidan för standardservon.
Lär genom att göra
- Om du vill att roboten tar större eller mindre steg, ändra på vinklarna i koden.
- Om du vill att roboten kryper snabbare eller långsammare, ändra på
delay()-tiden. - Testa hur många olika sätt du kan få roboten att krypa på, och vilket som är mest effektivt.