När två servon används samtidigt kommer din Arduino ibland inte kunna distribuera tillräckligt med ström. Det finns olika tekniker för att övervinna detta. I nästa exempel kommer du att skriva signaler separat till varje servo. Se även referenssidan för att använda servon som hjul. ![]()
Exempel 4.4
I det här exemplet kommer du att kontrollera två servon. En servo kommer att kontrolleras åt gången för att vara säker på att Arduinon kan förse tillräckligt med ström.
Material
- 1 Arduino Uno
- 1 Education-sköld
- 2 standardservon
Instruktioner
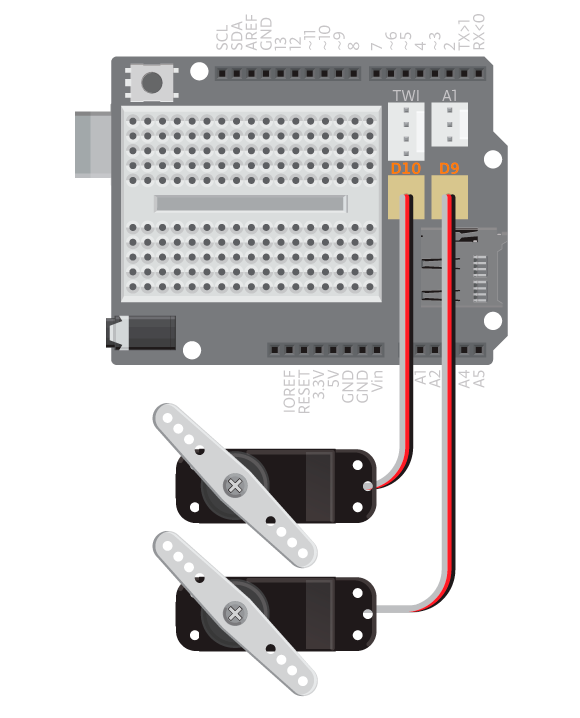
- Fäst en sköld på Arduinons ovansida.
- Koppla den ena servon till D9 och den andra till D10.
- Ladda upp den här koden:
Resultat
Första servon bör nu rotera till en 70 grader, vänta en sekund, och sedan rotera till 120 grades. Den andra servon bör sedan gå igenom samma rörelser. Detta bör sedan repeteras.
Så fungerar det
- Servo-biblioteket inkluderas.
- Servo-objekten
myservo1ochmyservo2deklareras. - I
setup()fästsmyservo1till pin 9 ochmyservo2till pin 10. - I
loop()lösgörsmyservo2ochmyservo1fästs till pin 9. myservo1roteras till 70 grader.- Programmet pausas i 1000 millisekunder.
myservo1roteras till 120 grader.- Programmet pausas i 1000 millisekunder.
myservo1lösgörs ochmyservo2fästs till pin 10.myservo2roteras till 70 grader.- Programmet pausas i 1000 millisekunder.
myservo2roteras till 120 grader.- Programmet pausas i 1000 millisekunder.
loop()fortsätter upprepas.
Lär genom att göra
- Skapa en robot som använder en standardservo och en servo med kontinuerlig rotation för att ta sig framåt.