El servo estándar es un tipo de motor que tiene un ángulo limitado de rotación (generalmente 180º) y que puedes controlar exactamente en qué ángulo se para.
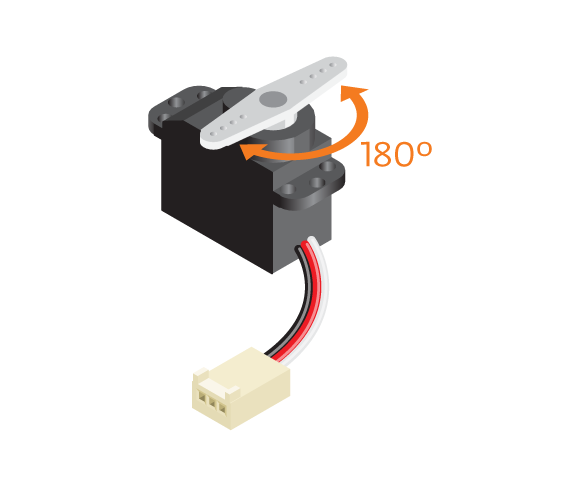
El que te ha sido proporcionado para este proyecto es más parecido a un microservo. Actúan igual que un servo normal pero son más pequeños y menos potentes al girar.
Materiales
- 1 placa Arduino Uno
- 1 shield Básica Educativa
- 1 servo estándar
Instrucciones
- Conecta el servo al puerto digital 9 del TinkerKit.
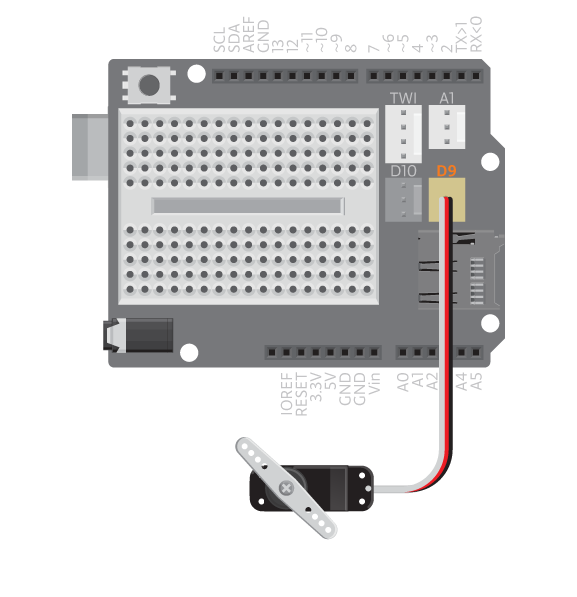
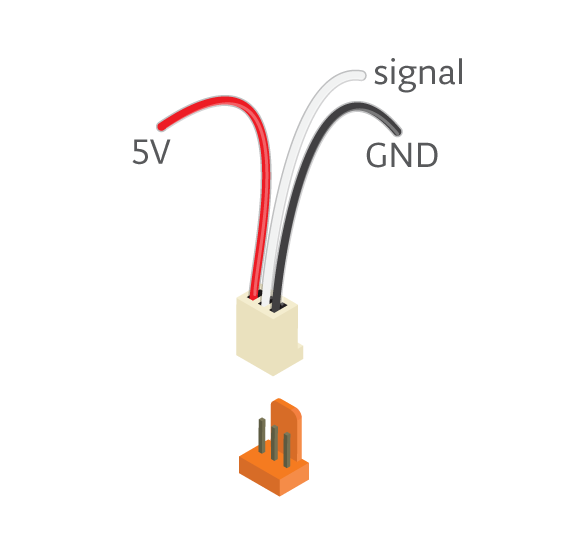
- Asegúrate de que la dirección de la conexión está bien: si estás sosteniendo el shield con la breadboard hacia ti, el cable negro del conector debe estar en el lado derecho.
Abre desde Arduino Archivo -> Ejemplos -> BasicEducationShield -> Help -> ServoEstándar.
/*
StandardServo
*/
#include <BasicEducationShield.h>
#include <Servo.h>
Servo me;
void setup(){
//Servo is initialized,
me.attach(9);
}
void loop(){
//Make the servo rotate to 76 degrees.
me.write(76);
}
Ejecuta el programa, y tendrás el servo apuntando a 76 grados. Cambia los grados en el código, cárgalo de nuevo y verás cómo se mueve a dicha posición.
Nota: Debido al diseño mecánico de tus proyectos, algunas veces el ángulo de giro permitido para el servo es mucho menor a 180 grados. Si ves que el brazo del servo empuja o tira con fuerza hacia otras partes de tu proyecto, intenta bajar el brazo del servo y ponlo de nuevo en un ángulo más apropiado. Puede requerir varios intentos hasta que consigas ponerlo bien.
¿No funciona?
- Asegúrate que has conectado el servo al mismo pin que el utilizado en el código.