Este pequeño robot puede gatear. Es todo lo que puede hacer, y tampoco es muy bueno en eso, pero es muy bonito y divertido.
Materiales
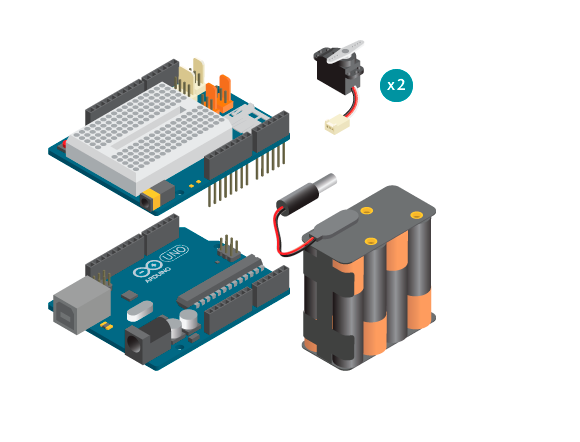

- 1 placa Arduino Uno
- 1 Shield Básica Educativa
- 2 motores servo estándar
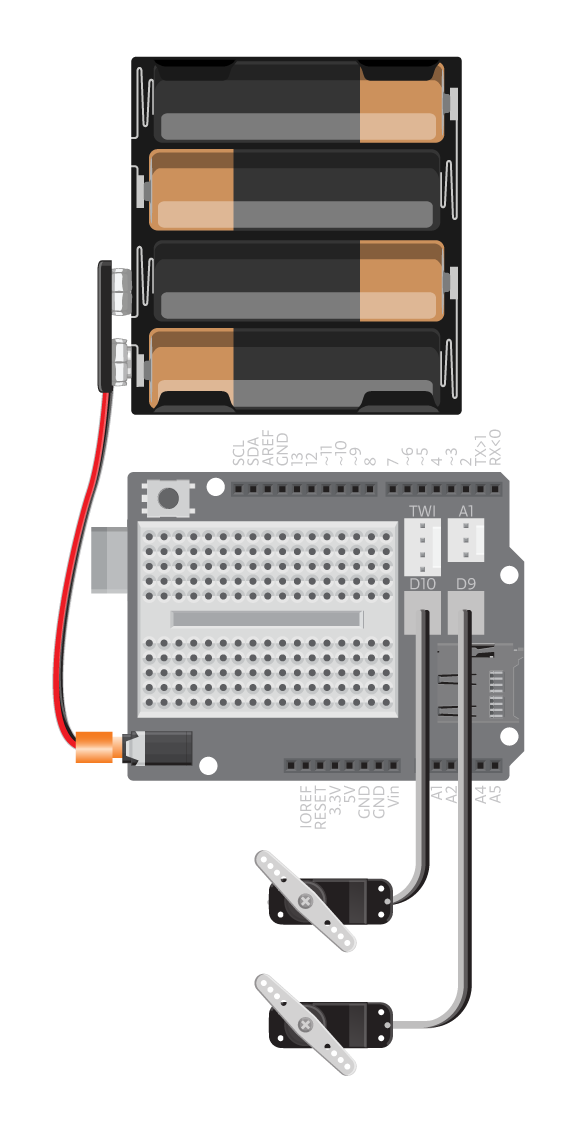
- 8 Pilas AA
- 1 portapilas
- 1 conector a corriente
- 1 kit robot gateador
Instrucciones
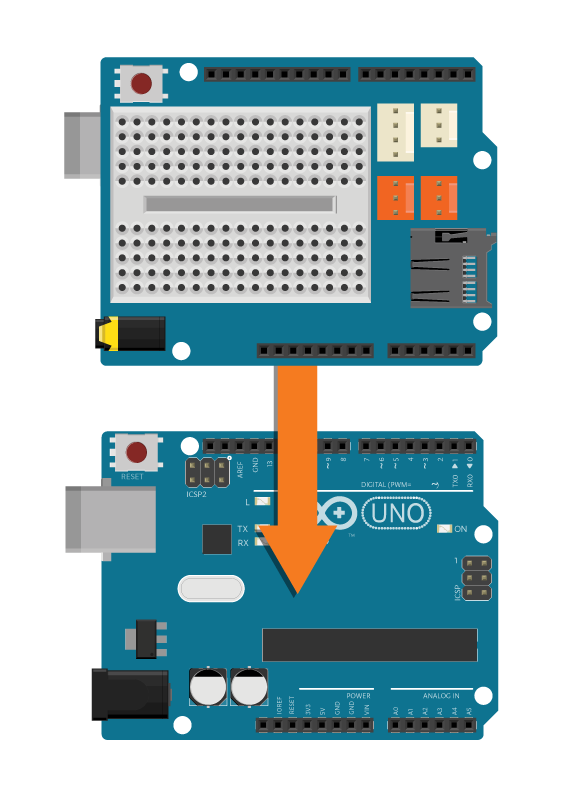
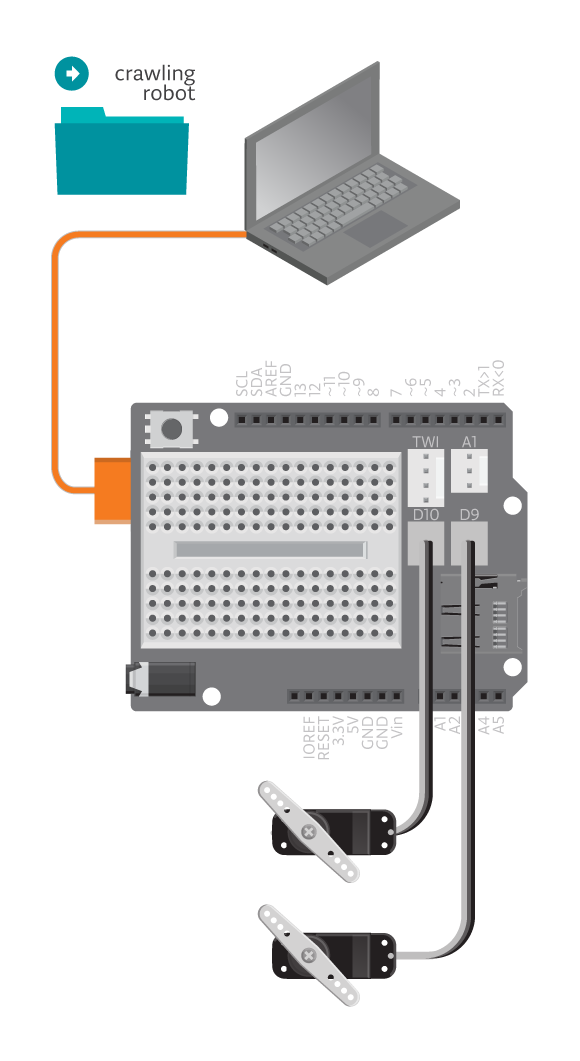
- Conecta la shield en la parte superior de tu placa Arduino.
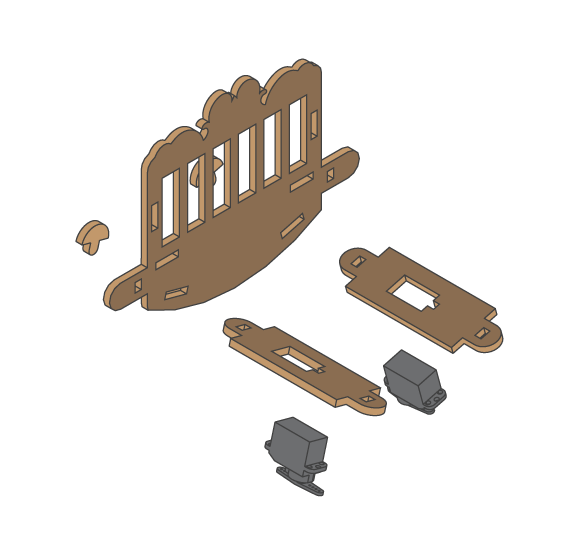
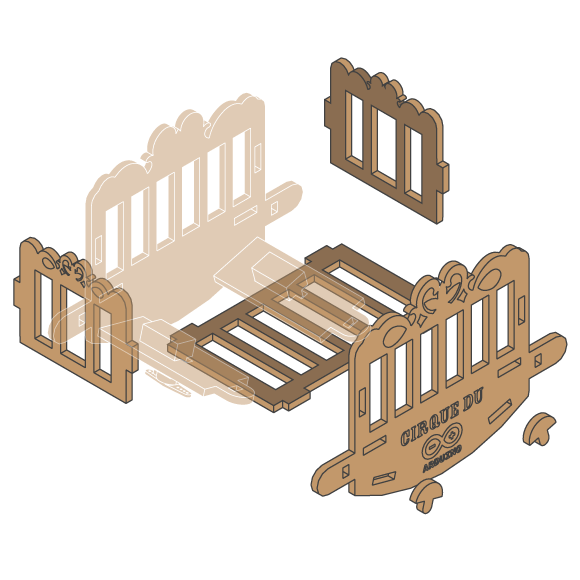
- Monta el robot gateador.
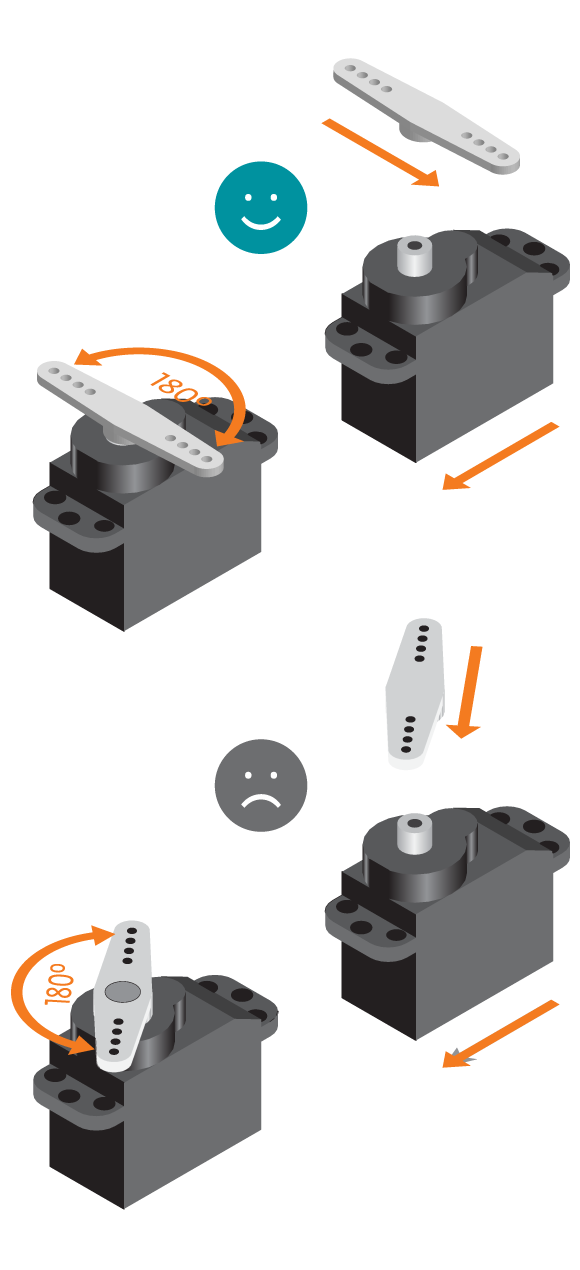
- Gira el servo a mano hasta que llegue al final. A continuación, separa y vuelve a colocar el brazo del servo para que tenga la longitud del servo. Haz esto a ambos servos, delanteros como traseros.
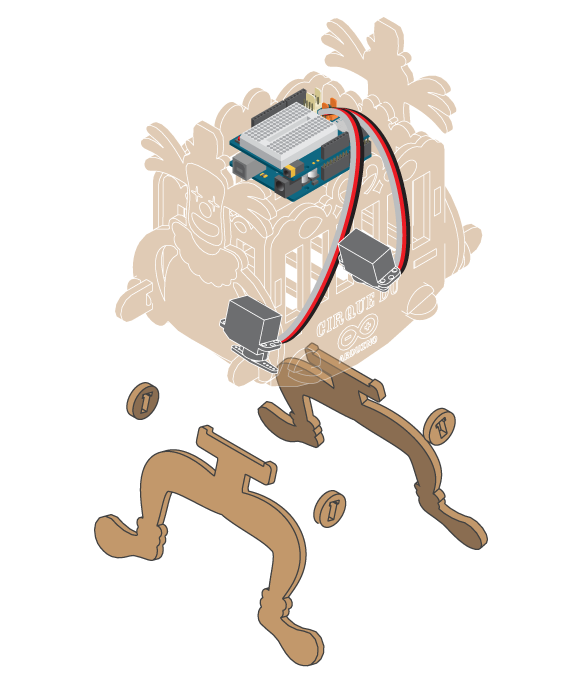
- Monta un motor en cada agujero de servo y sujeta las piernas a los ejes de los servos.
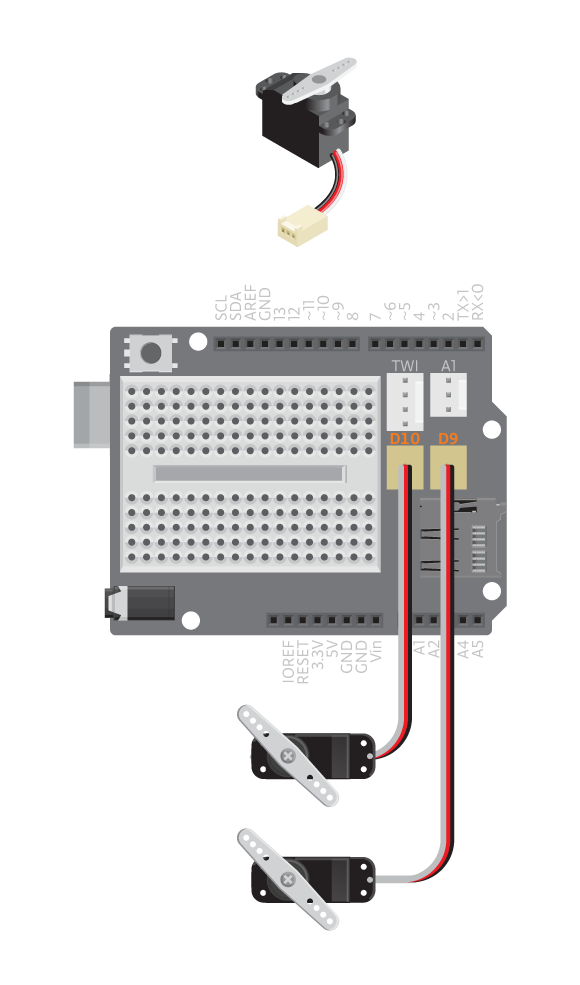
- Conecta el servo delantero al pin D9. Conecta el servo trasero al pin D10.
- Carga el ejemplo CrawlingRobot.
- Desconecta tu Arduino del ordenador y colócalo en el ”cuerpo” del robot gateador
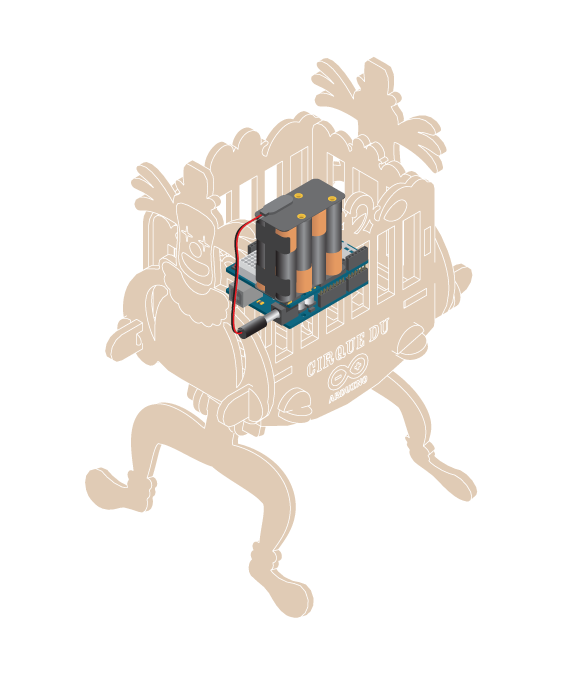
- Conecta la pila de 9V al portapilas y conéctalo al jack de alimentación de Arduino.
Código
Puedes encontrar el código en: Archivo -> Ejemplos -> BasicEducationShield -> Robots -> CrawlingRobot
Cómo funciona
La posición de los servos frontales está ajustada a 120 grados. Esperamos a 200 milisegundos y luego se cambia la posición de los servos de atrás a 60 grados. Es decir, el ángulo opuesto a la parte frontal. Tras otros 200 milisegundos establecemos la posición del servo frontal a 60 grados. De nuevo 200 milisegundos más tarde, ajustamos el servo a la posición opuesta.
¿No funciona?
- ¿No están funcionando los servos? ¿Funcionan cuando Arduino está conectado al ordenador pero no al utilizar la pila? Si es así, intenta cambiar la pila.
- ¿Sigue sin funcionar? Asegúrate de que has conectado los servos correctamente. Prueba a establecer diferentes ángulos para cada uno de ellos de uno en uno con el ejemplo Archivo -> Ejemplos -> BasicEducationShield -> Help -> StandardServo.
¡Sigue experimentando!
- ¿Quieres que el robot de pasos más grandes o más pequeños? Intenta cambiar los ángulos.
- ¿Quieres que el robot gatee más rápido o más lento? Intenta cambiar el tiempo de
delay. - Prueba a ver de cuántas maneras diferentes puedes hacer que el robot se arrastre y cuál es el más eficiente.