Spy on your cat with this robot camera. Mount the camera robot and control it with a small joystick. You can watch the camera image on the computer and when you see your cat doing something suspicious, take a picture!
Materials
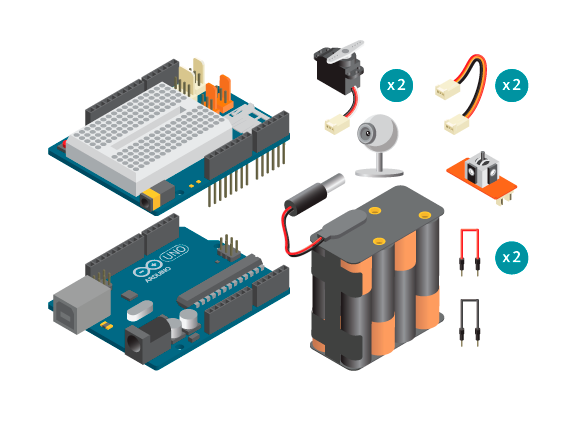

- 1 Arduino Uno board
- 1 Education Shield
- 1 web camera
- 1 TinkerKit joystick
- 2 standard servos
- 2 TinkerKit wires
- 3 jumper wires
- 8 AA batteries
- 1 AA battery holder
- 1 power plug
- Robot camera kit
Instructions
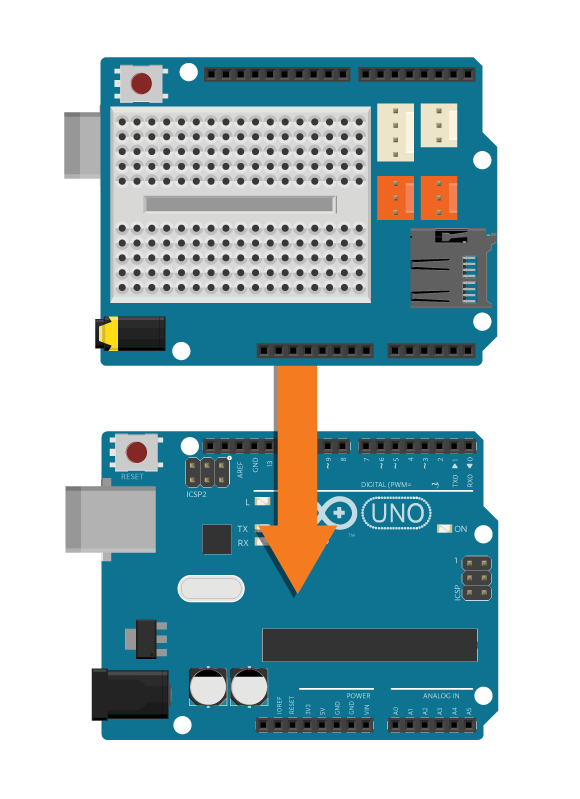
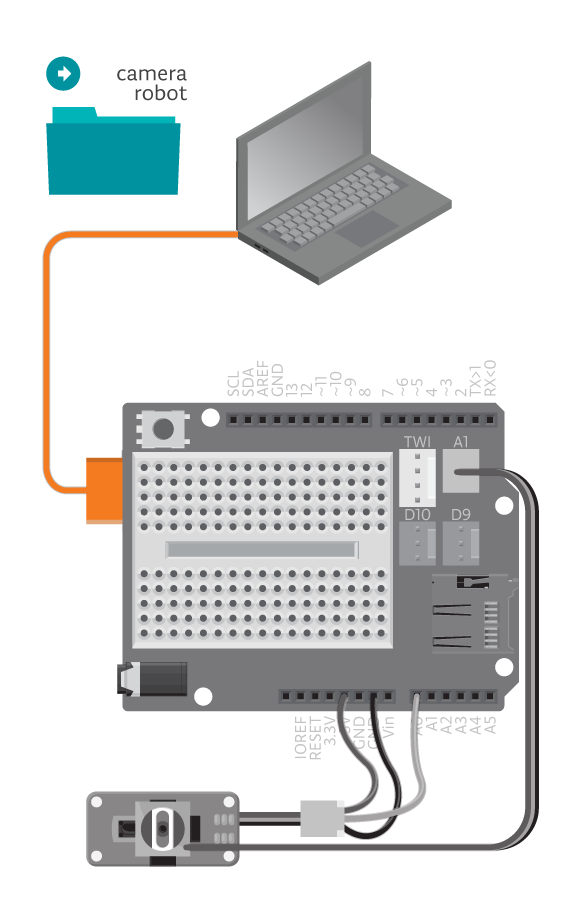
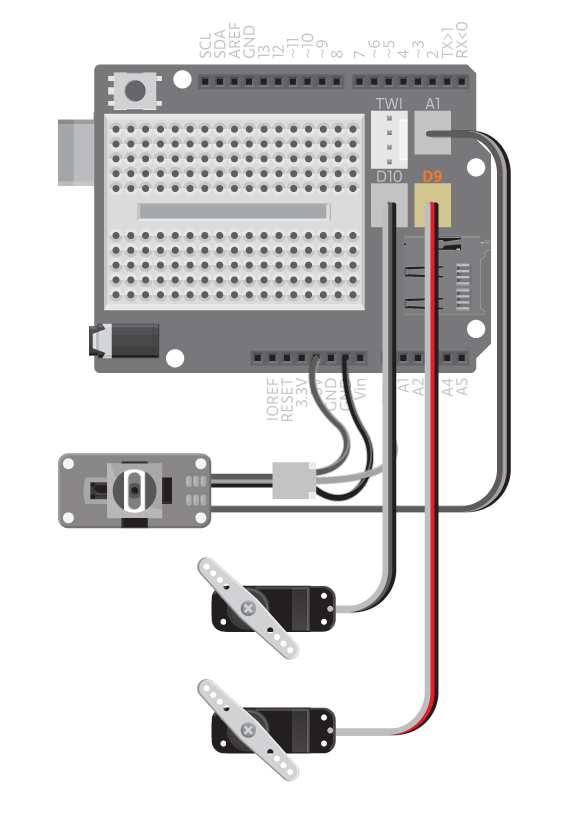
- Attach the shield onto the top of the Arduino board.
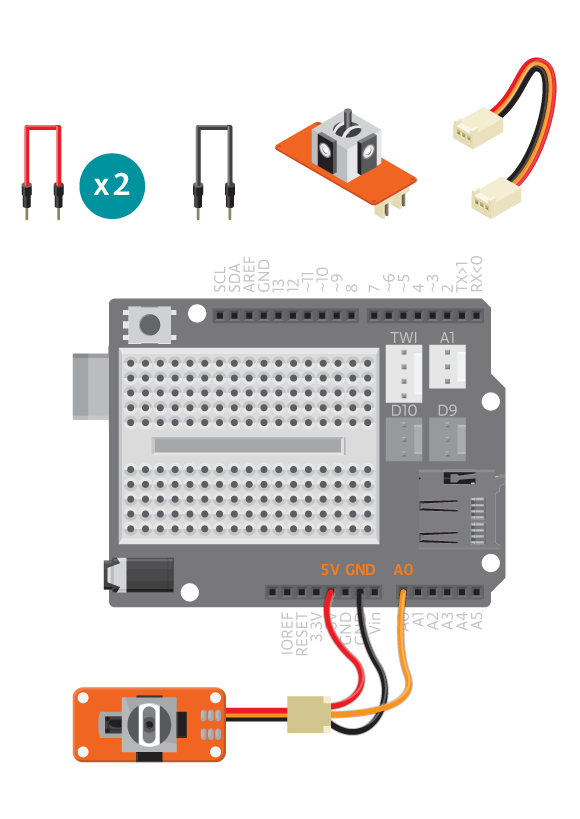
- Connect a TinkerKit wire to the joystick connector labeled as ‘Y’. Connect a red jumper wire to the red wire of the TinkerKit wire, and to 5V. Connect a black jumper wire to the black wire of the TinkerKit wire and to GND. Connect the last jumper wire to the TinkerKit wire and analog pin A0.
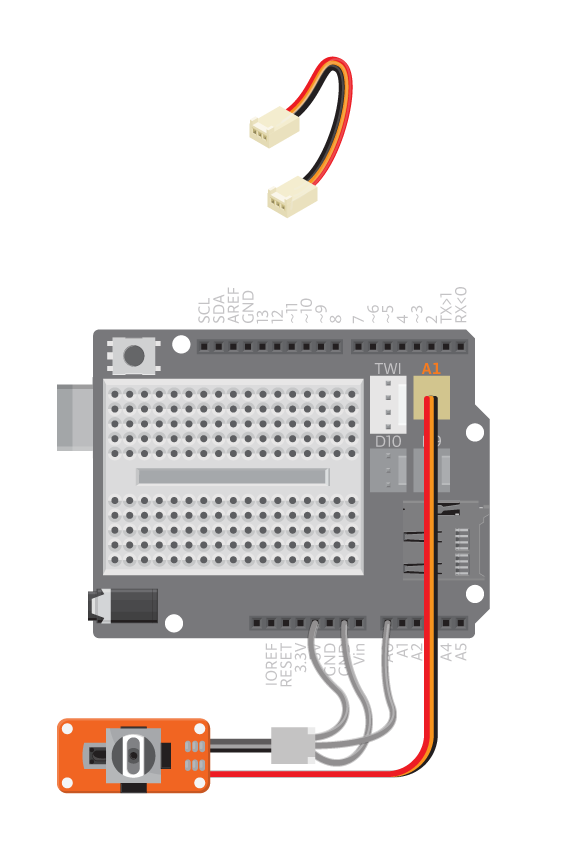
- Connect the second TinkerKit wire to the joystick connector labeled as X and to the analog TinkerKit connector, A1.
- Connect the assembly to a computer and upload example ‘CameraRobot’.
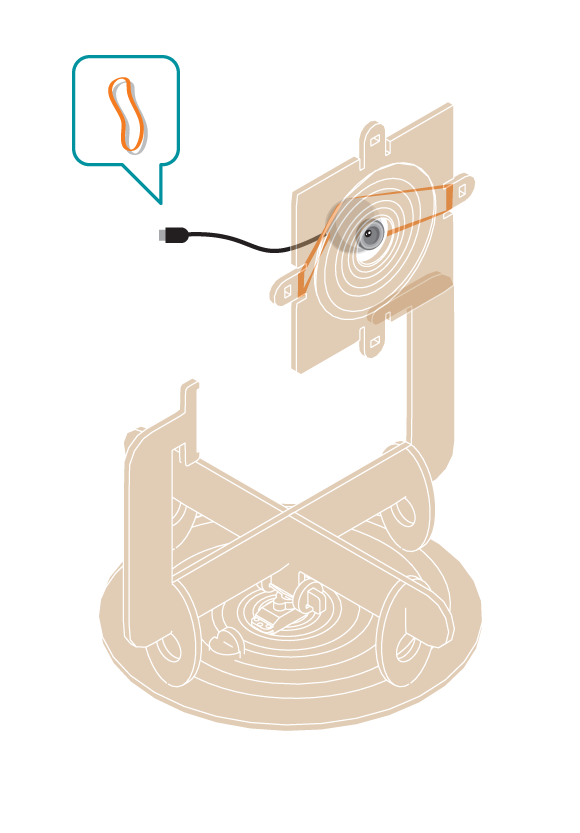
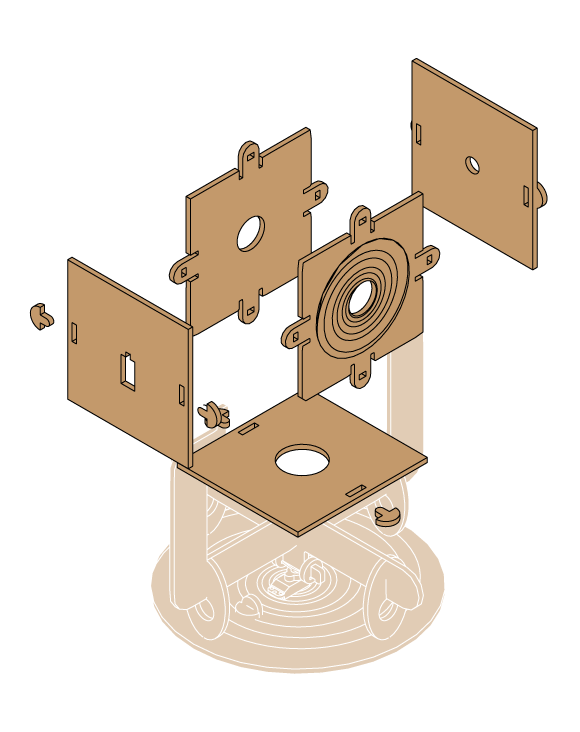
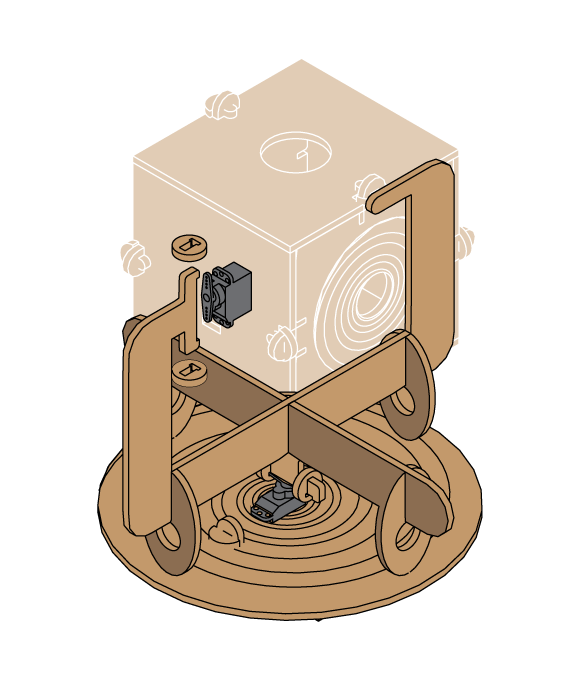
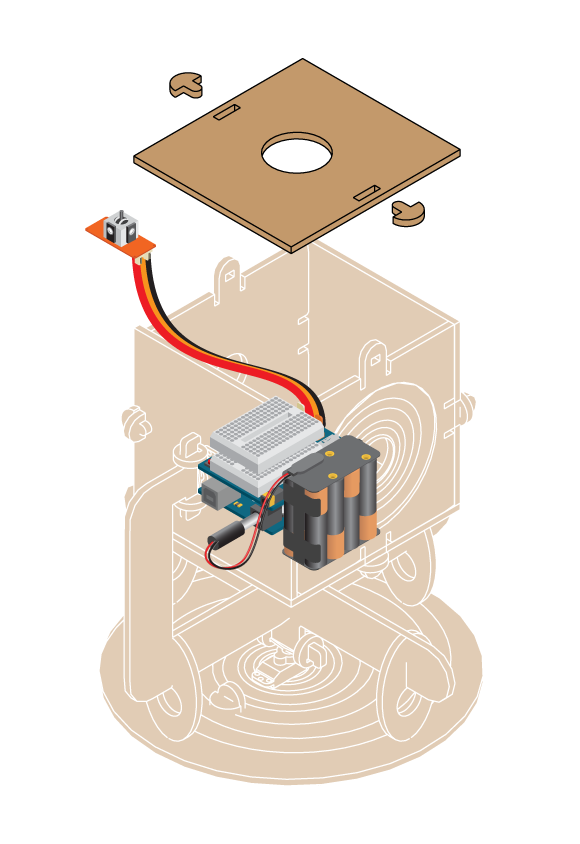
- Build the kit, do not forget to put the web camera inside!

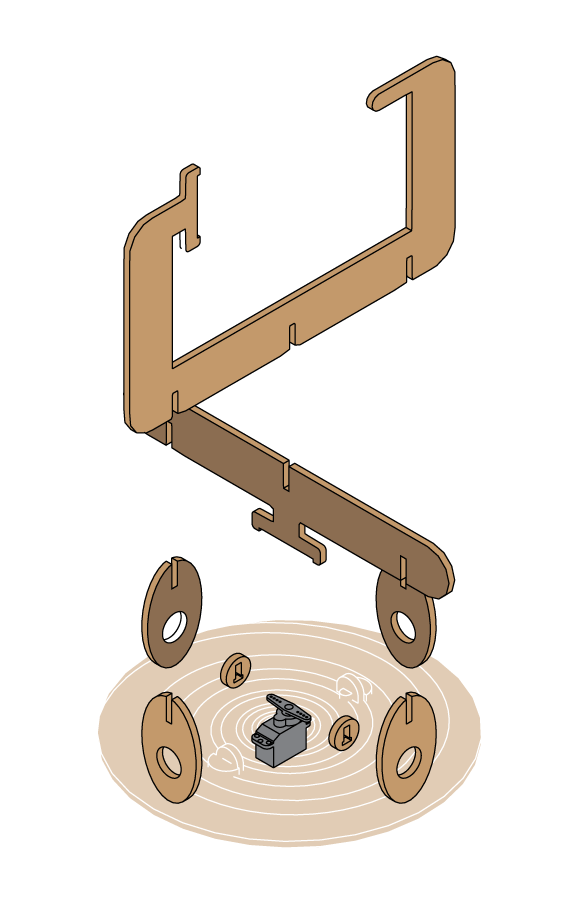
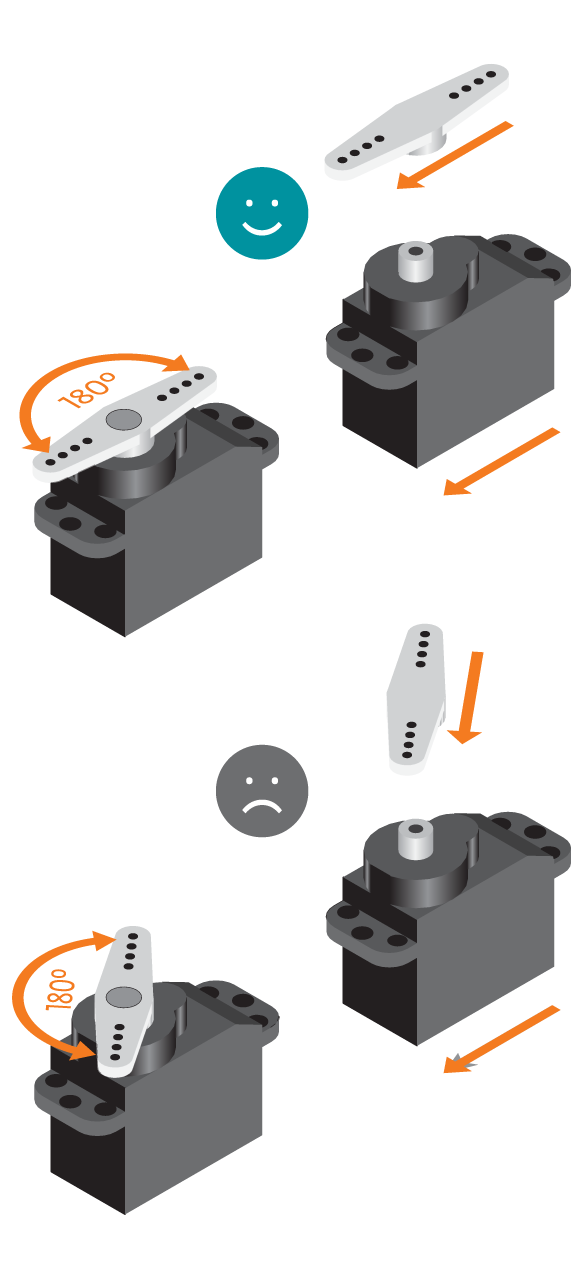
- Turn the servo by hand until it reaches the end. Turn it by hand to a 90 degrees position. Fix the rod-shaped arm along the servo. Do the same with the other servo.
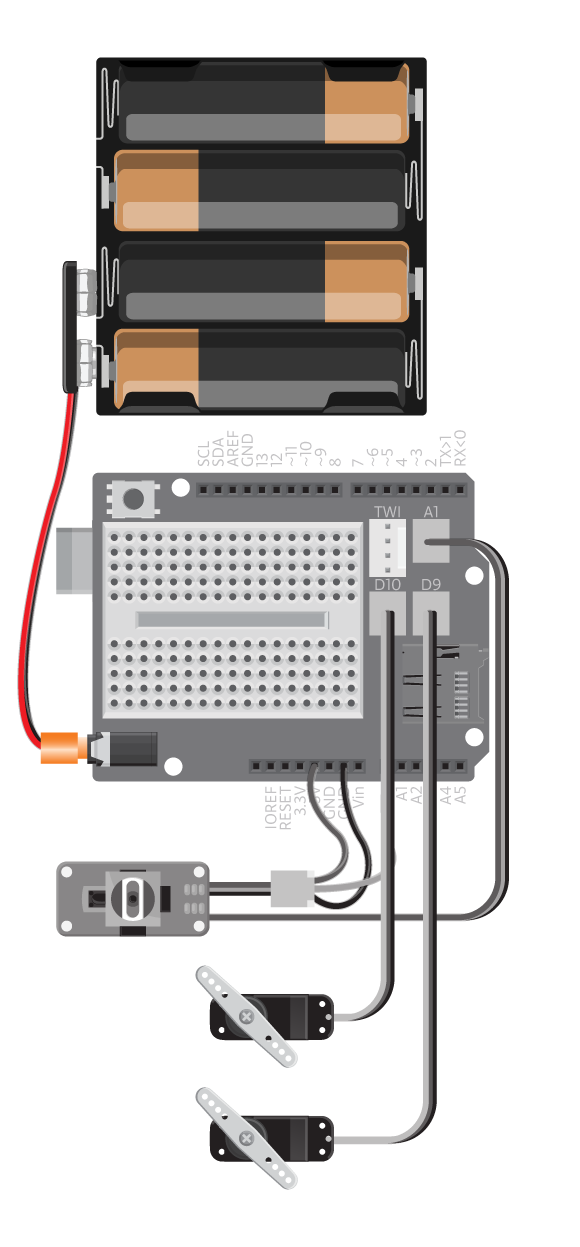
- Connect the side servo to D10.
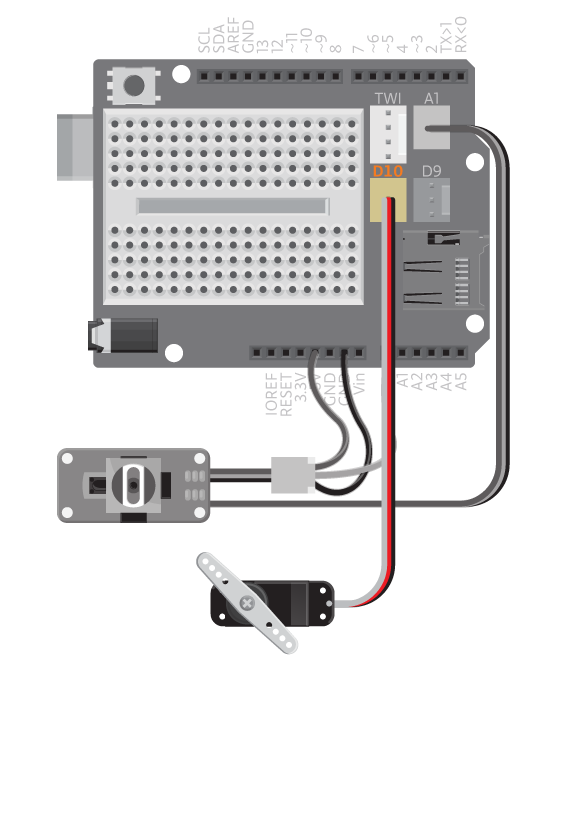
- Connect the pan servo to D9.
- Connect the battery pack to the power socket.
- Connect the web camera to your computer. Open the Processing sketch called CameraRobot and run it.

Code
Find the code in File>Examples>EducationShield>Block4-Robots>Projects>CameraRobot
Find the Processing code in File>Examples>EducationShield>Block4-Robots>Projects>CameraRobot>Processing>CameraRobot
How it works
- The EducationShield and Servo libraries are included.
- The Joystsick and Servo objects are declared.
- The variables to be used to set the servo positions are declared,
panAngleandtiltAngle. - The variables to be used to store the joystick values in are declared,
panJoystickandtiltJoystick. - In
setup(), the servo objects are initialized. - In
loop(), the joysticks x value is read and stored inpanJoystick. - The joysticks y value is read and stored in
tiltJoystick. - If
panJoystickis not equal to 0, it means that the joystick is moved in the x axis and the following will happen.- If
panJoystickis equal to 1 andpanAngleis less than 180,panAngleis increased with 1. - Else if
panJoystickis equal to -1 andpanAngleis more than 0,panAngleis decreased with 1.
- If
- The next if statement in
loop()checks iftiltJoystickis not equal to 0. If that is true, the following happens.- If
tiltJoystickis equal to 1 andtiltAngleis less than 180,tiltAngleis increased with 1. - Else if
tiltJoystickis equal to -1 andtiltAngleis more than 0,tiltAngleis decreased with 1.
- If
- The position of the pan servo is set with
panAngle. - The position of the tilt servo is set with
tiltAngle. - The program pauses for 5 milliseconds to give the servos some time to move into place.
loop()continues to loop.
Troubleshooting
- Refer to the illustration and double check your connections. Make sure the shield and jumper wires are firmly connected.
- Make sure you connected the servos correctly. See the reference to make sure the servos work.
- Make sure you have connected the joystick correctly. See the reference to make sure it works.
Learn by doing
- The servos might be moving too slow or too fast. Change the delay in the end of loop or change the increasing and decreasing steps of the angles.
- The servos might be moving too far to the sides, or too far up and down. Limit the angles allowed.
- Build something else with the same pan tilt structure that you control with the joystick.